
Le drone hélicoptère du projet ReSSAC, moyen d'expérimentation et de démonstration en temps réel de capacités d'autonomie décisionnelle. |
Les engins sans pilote ne sont pas des appareils télécommandés améliorés. Ils doivent pouvoir prendre des décisions pertinentes en fonction des conditions rencontrées. Imaginons par exemple, en temps de guerre, des soldats blessés en zone ennemie, difficile d’accès. Comment le drone peut-il repérer les lieux et éventuellement récupérer ces rescapés ? C’est l’objet du projet ReSSAC (Recherche et Sauvetage par Système Autonome Coopérant), développé par l’Onera en collaboration avec plusieurs laboratoires français et étrangers. " Les tâches sont multiples : prise et traitement d’image, traitement d’informations, optimisation des stratégies d’action en environnement partiellement connu… ", indique Patrick Fabiani, responsable de ce projet à l’Onera.
|
|
Au départ, le drone possède une carte numérique du relief du terrain. Quand il arrive à proximité des rescapés (repérés grâce aux traces qu’ils laissent ou aux signaux qu’ils émettent), il explore plus finement la zone afin d’obtenir toutes les informations sur l'environnement alentour, et de trouver l’approche la plus adaptée pour les récupérer. Cette tâche, qui paraît simple, est en fait extrêmement complexe, et les démonstrations des capacités du drone tournent parfois au comique. « Nous avons demandé au drone de reconnaître un atterrissage parmi un champ d'obstacles en carton, raconte le chercheur. Lors de la première tentative, les cartons ont été balayés par le souffle de l’hélicoptère. Lorsque nous les avons lestés, le drone a contourné la zone des cartons pour trouver un endroit plus propice.
|
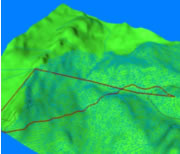
Carte numérique de relief de terrain utilisée par les logiciels de planification initiale de mission du drone . |
|
Pas facile de démontrer les capacités du drone autonome ! Même en démonstration réussie, il marque son indépendance dans le choix de son lieu d'atterrissage ! » L’équipe du département Commande des systèmes et dynamique du vol (DCSD) de l'Onera a également simulé l’appontage d’un drone hélicoptère sur un bateau, en organisant un rendez-vous entre l’hélicoptère et un point virtuel mobile (faute de bateau pour tester l’appontage en conditions réelles).

Objectif : cartographier les obstacles du terrain et déterminer le meilleur point de poser dans une zone objectif. L'opérateur n'a plus qu'à valider éventuellement le choix du drone ReSSAC.
Le projet ReSSAC ne concerne pas les engins eux-mêmes, mais toute « l’intelligence embarquée » permettant de les rendre autonomes. L’équipe du projet ReSSAC a utilisé un hélicoptère télécommandé produit par Yamaha, destiné à épandre des phytosanitaires sur les champs de thé ou de riz. Puis, les ingénieurs du département DCSD ont développé une version autonome, capable de naviguer d’un point à un autre en utilisant le positionnement au GPS. Pour cela, l’hélicoptère a été équipé de liaisons de données supplémentaires reliant les calculateurs à bord et au sol développés par l’équipe de l'Onera. Ceux-ci sont destinés à remplir plusieurs tâches : le pilotage, la navigation, le traitement des informations recueillies par les caméras et la prise de décision.
|
|
Pour remplir ces missions, les calculateurs exécutent des algorithmes, enchaînements d’opérations permettant de réaliser des tâches. " Nous devons hiérarchiser les fonctions : avant de demander à l’hélicoptère d’aller d’un point à un autre, il faut vérifier que l’engin sait se stabiliser ", explique Patrick Fabiani. De même, avant de lui faire analyser des images ou prendre des décisions, il faut être sûr que cela ne perturbe pas les autres tâches : un éventuel bug sur une fonction subalterne ne doit pas se répercuter sur les tâches qui assurent l’intégrité de l’hélicoptère. " Ecrire un programme est simple, mais lorsqu’on imbrique différents programmes les uns avec les autres dans un système de gestion de mission, il est très difficile de maîtriser la complexité. "
|

Le drone ReSSAC permet d'embarquer des systèmes d'acquisition et de traitement d'information en boîtier externe. |
|
D’où la nécessité de valider en conditions réelles : les programmes sont conçus en pensant à certaines situations, mais lorsqu’on lâche le drone dans la nature, de nombreux événements s'enchaînent inéluctablement. De même, la réponse de l’engin doit rester robuste aux variations de conditions de vol : au crépuscule ou en plein midi, qu’il y ait des ombres ou non, les algorithmes doivent répondre dans tous les cas.
|
|
|
" Ce qui est difficile, c’est de construire une architecture de conduite sûre, fiable, et compatible avec la prise de décision à bord, conclut Patrick Fabiani. Nous savons le faire, mais uniquement en environnement expérimental. Cela reste insuffisant pour obtenir une autorisation plus générale permettant à nos drones de voler dans toutes les zones aériennes entre deux aérodromes. " Les pilotes restent indispensables. Combien de temps encore ?
Cécile Michaut, journaliste scientifique.
|


