
The ReSSAC project's helicopter drone, a tool for real time experimentation and demonstration of autonomous decision making capabilities |
Unmanned vehicles are not improved remote controlled machines. They must be able to make pertinent decisions according to the conditions they encounter. Let's imagine, for example, soldiers injured in war time in an enemy area that is difficult to access. How would the drone find the place and recover these survivors? That is the purpose of the ReSSAC (Search and Rescue by Cooperating Autonomous System) project developed by Onera in collaboration with several French and foreign laboratories. "There are many tasks: image capture and processing, data processing, optimization of operating strategies in a partially known environment, etc., " indicated Patrick Fabiani, the project's manager at the Onera.
|
| At the start, the drone has a numerical relief map of the terrain. When it gets near the survivors (located by the tracks they have left or the signals they transmit), it explores the area more closely in order to obtain all the information on the surrounding environment and find the most suitable approach for rescuing them. This task, which appears simple, is in fact extremely complex and the demonstrations of the drone's capabilities sometimes become comical. "We asked the drone to recognize a landing site among a field of cardboard obstacles," the researcher recounted. "During the first attempt, the boxes were blown away by the helicopter's down draught. When we weighed them down, the drone by-passed the area of boxes to find a more auspicious place. |
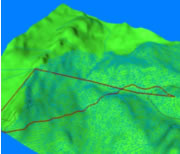
Numerical relief map of terrain used by the drone's initial mission planning software |
|
It's not easy to demonstrate the capabilities of an autonomous drone! Even in a successful demonstration, it shows its independence in the choice of its landing place!" The Systems Control and Flight Dynamics (DCSD) Department's team at Onera also simulated the deck landing of a helicopter drone on a ship by organizing a meeting between the helicopter and a virtual moving point (not having a boat for testing the deck landing under real conditions).as facile de démontrer les capacités du drone autonome ! Même en démonstration réussie, il marque son indépendance dans le choix de son lieu d'atterrissage ! » L’équipe du département Commande des systèmes et dynamique du vol (DCSD) de l'Onera a également simulé l’appontage d’un drone hélicoptère sur un bateau, en organisant un rendez-vous entre l’hélicoptère et un point virtuel mobile (faute de bateau pour tester l’appontage en conditions réelles).

Objective: to map the terrain's obstacles and determine the best point to land in a target zone. All the operator has to do is perhaps validate the ReSSAC drone's choice.
The ReSSAC project does not concern the vehicles themselves but all of the "on-board intelligence" that makes them autonomous. The ReSSAC project team uses a remote controlled helicopter produced by Yamaha, intended for spraying plant protection products on tea or rice fields. Then, the DCSD department's engineers developed an autonomous version, capable of navigating from one point to another using GPS location. To do this, the helicopter was equipped with additional data links connecting the on-board and ground computers developed by the Onera team. These are designed to perform several tasks: piloting, navigating, processing the data acquired by the cameras and decision making.
|
To perform these missions, the computers execute algorithms to sequence the operations that carry out the tasks. "We have to structure the functions: before asking the helicopter to go from one point to another, we have to check that the vehicle can stabilize itself", explained Patrick Fabiani. Similarly, before getting it to analyze images or take decisions, the team has to be sure that this operation does not disrupt the other tasks: any bug in a minor function must not affect the tasks that ensure the helicopter's integrity.
|

Data acquisition and processing systems can be carried on board the ReSSAC drone as an external unit. |
"Writing a program is simple, but when you nest different programs with each other in a mission management system, it's very hard to control the complexity." Hence, the need to validate the programs in real conditions; they are designed with certain situations in mind but when the drone is released in the natural environment, numerous events inevitably follow on from each other. Similarly, the vehicle's response must remain robust to the variations in flight conditions: at sunset and midday, the algorithms must respond correctly in every case, whether there are shadows or not. |
|
| "What's difficult is constructing a control architecture that's safe, reliable and compatible with on-board decision making," concluded Patrick Fabiani. "We know how to do it, but only in an experimental environment. That's not enough to get a more general authorization that allows our drones to fly in all of the aerial zones between two airfields." Pilots are still indispensable but for how much longer?
Cécile Michaut, scientific reporter.
|


