
In January 2014, a new control law, known as adaptive control, was uploaded on board the CNES scientific satellite "Picard" dedicated to studying the sun. This satellite, on a mission beyond its design life expectancy, has lent itself to demonstrate these innovative algorithms. Challenges: improving performance and especially shortening the design time.
Edited ©CNES image. Details about the Picard Mission
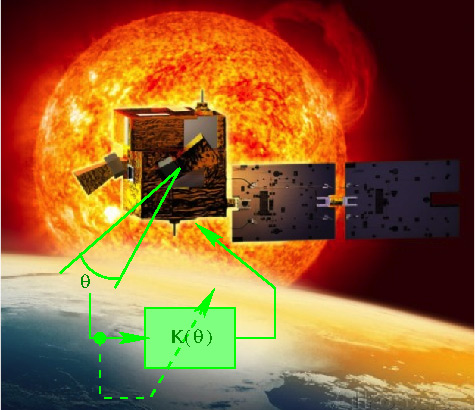
For the rated operation of the three measuring instruments constituting its payload, the micro-satellite Picard must point accurately towards the sun. In this simplified view, the angle θ is the angular deviation from the desired direction. The operator K(θ) represents the control law that provides regulation (maintaining the direction).
The Picard satellite must point towards the sun regardless of its position in orbit; it must thus continuously adjust its angular position despite numerous disturbances and sometimes defective measurement signals.
The innovation stems from the nature of this attitude control’s device: regulation rules are dynamically adjusted depending on the deviation from the pointing direction (control engineers say that the gains are adjusted online according to the error measured).
By limiting the size of the gains to "wide angles" (significant error) this strategy saves actuators* (and satellite energy), without resorting to more traditional approaches based on mode switching (sudden transition from "coarse" pointing to "fine" pointing).
Thus, a continuous attitude control law is obtained, for which stability proof (and therefore proof of proper operation) can be obtained a priori. In addition, the adaptive control** laws thus conceived will also be able to adjust effectively to changes in payloads. Performance is improved and, most importantly, the design time is shortened for a faster development cycle.
Today’s success in space was made possible thanks to the thesis of Alexandru Razvan Luzi, co-supervised in Toulouse by Jean-Marc Biannic (ONERA/DCSD) and Dimitri Peaucelle (LAAS-CNRS), with the invaluable help of two CNES-CST expert engineers: Christelle Pittet and Jean Mignot.
After only three years of studies, this new control architecture has progressed from being a theoretical concept to becoming a practical implementation on a complex and demanding craft.
Onera Contact Person
Jean-Marc Biannic, jean-marc.biannic \@/ onera.fr
Notes
* Adaptive control: In the aviation world, adaptive control became a fleeting success in the 1970s to quickly give way, due to unfortunate experiments, to the robust control techniques that we still know today and due to which Onera’s expertise is widely recognized. However, in the near future we can expect a successful combination of adaptive techniques and robust control techniques. The ambition surrounding such a combination would be to make adaptive control laws "certifiable". There is also no doubt that the increasing automation of drones, a sector in which Onera plays a key role, will accelerate this safer and cheaper process.
** Satellite actuator: device capable of generating torque to correct the attitude or orientation of the satellite as needed. Depending on the needs, four types of actuators can be used on a satellite: gas jets, inertia wheels, gyroscopic actuators and magneto-couplers. Three inertia wheels are used on the satellite Picard to perform the main adjustments in the short term. However, once their maximum speeds have been reached, these wheels no longer produce torque (speed saturation). It is therefore essential, when designing control laws, to manage the actuating capacity of the wheels. Note that, in the longer-term, wheel desaturation can be performed using an additional magnetic-coupling actuator device.

