
Un drone autonome, c’est devenu presque banal. Mais parvenir à faire coopérer plusieurs drones terrestres, maritimes ou aériens pour une mission précise reste une gageure.
Zoom in the lab - Numéro 56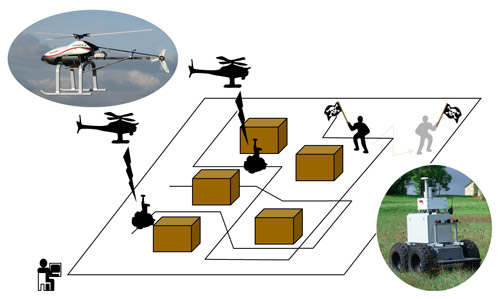
Dans ce scénario urbain, la coopération est la clé de la réussite de la mission menée par des drones autonomes aériens et terrestres
Les drones sont des outils précieux pour repérer une scène de combat, rechercher des personnes en danger, ou encore sécuriser une zone. Leur efficacité sera décuplée si, au lieu d’agir seuls, ils sont capables de coopérer avec d’autres drones, de manière autonome. C’est l’objectif du projet Action commandé par la Direction générale de l’armement (DGA) et mené par l’ONERA à Toulouse en partenariat avec le Laboratoire d'Architecture et d'Analyse des Systèmes (LAAS-CNRS), également à Toulouse.
 |
 |
 |
 |
Drones acteurs du projet Action : Ressac, l'aérien (ONERA) ; Mana, le terrestre (LAAS-CNRS) ; Daurade, le sous-marin (DGA)
Lorsqu’on dit drone, on pense immédiatement aux engins volants. Mais ils peuvent aussi être terrestres, sous-marins, ou en surface. Tous ces drones se déplacent dans des environnements différents et sont complémentaires. « Comment un drone terrestre et un drone aérien peuvent-ils coopérer, par exemple pour surveiller une zone ?, interroge Magali Barbier, responsable du projet pour l’ONERA. Nous travaillons sur les logiciels embarqués par ces engins, afin qu’ils réalisent ensemble des missions de la manière la plus autonome possible, en minimisant les contacts avec les opérateurs humains. »
Avant de pouvoir interagir, le drone doit d’abord être autonome. Son logiciel comporte donc une première couche « mono-drone » permettant de gérer chaque entité, lui permettant parmi d'autres fonctions d’éviter les obstacles. Cela implique notamment de récupérer les données de ses capteurs, des autres véhicules et de l’opérateur, de planifier une suite de tâches (déplacements, perception…), et de déclencher ces actions en fonction de l’avancement de la mission. Le projet Action vise à concevoir et développer une architecture logicielle de planification, de supervision et de coordination « multi-drones », pour gérer la coopération. Ainsi, si un drone terrestre n’est pas capable d’atteindre un lieu prévu, il peut faire appel à un drone aérien qui effectue une cartographie au-dessus de sa position et lui transmet les nouvelles données sur l’environnement au sol. Les couches « multi-drones » des différents drones communiquent entre elles pour une coopération efficace et la réalisation de la mission en s’adaptant aux événements. Et au sein d’un même drone, ses parties « mono » et « multi » interagissent, par exemple pour décider à quel moment déclencher un échange d’informations.
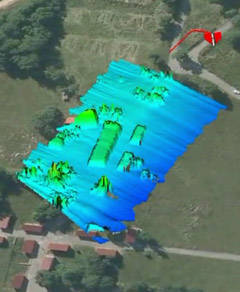 Le drone Ressac a réalisé une cartographie de l'environnement du drone terrestre pour lui permettre de trouver un nouvel itinéraire |
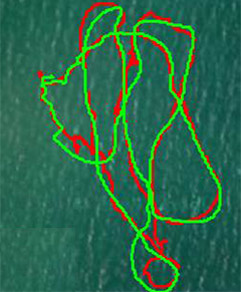 Suivi d'un navire par le drone Ressac (en vert : GPS, en rouge : vision) Suivi d'un navire par le drone Ressac (en vert : GPS, en rouge : vision) |
« La première difficulté est liée aux communications entre drones, indique la chercheuse. Celle-ci est rarement parfaite, par exemple les liaisons entre des drones terrestres peuvent être gênées par un bâtiment. Le choix dans le projet Action est de planifier des rendez-vous réguliers entre les drones d’une part et avec l’opérateur d’autre part, pour permettre le suivi de l’avancement de la mission. Si un drone est absent lors d’un rendez-vous, des stratégies sont alors élaborées : faut-il rester sur place et attendre que la communication se rétablisse ? Ou aller la rechercher, et dans ce cas, où ? » Autre difficulté : connaître sa localisation, lorsque la DGA souhaite ne pas dépendre du GPS américain. Chaque drone terrestre se base donc sur ses propres capteurs pour se déplacer dans son environnement, et sur les informations fournies par les autres drones pour améliorer la connaissance de leur position respective.
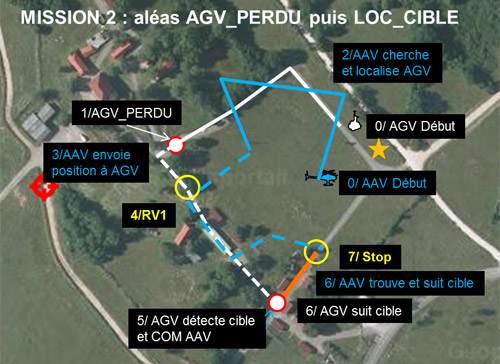
Déroulement d'une mission de poursuite d'une cible au sol par un drone terrestre (AGV - Autonomous Ground Vehicle), qui reçoit l'aide d'un drone aérien (AAV - Autonomous Aerial Vehicle).
Pour tester la coopération des drones, les chercheurs sont en contact avec les états-majors, avec lesquels ils consolident les objectifs des missions, comme pour identifier et suivre des intrus dans une zone d’habitations. Cette mission est d’abord simulée sur ordinateur, puis expérimentée avec des véhicules réels sur le terrain, avec de plus en plus de drones. Aujourd’hui, elle a été réussie avec un drone aérien coopérant avec un drone terrestre, et avec un drone aérien coopérant avec deux drones terrestres. Pour les drones maritimes et aériens, la première mission sera de localiser des mines éventuellement déposées par un navire, la deuxième sera de trouver l’épave d’un chimiquier récemment coulé. « La particularité de toutes ces missions est la très grande autonomie de l’équipe de drones, précise Magali Barbier. L’idée est d’envoyer des drones réaliser une mission de surveillance, de recherche…, en leur disant « débrouillez-vous ». Nous souhaitons limiter le nombre d’interventions des opérateurs, même lorsque le nombre de drones augmente. »
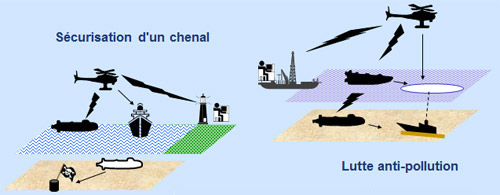
Les prochaines missions mettront à l'épreuve l'architecture décisionnelle du projet Action dans un contexte maritime
Ces logiciels « multi-drones » peuvent s’intégrer à n’importe quel drone disposant d’un logiciel ouvert (dont on connaît le programme) possédant déjà un minimum d’autonomie individuelle. Chaque drone avec son propre logiciel peut donc se coordonner avec d’autres drones, mêmes s’ils disposent d’un autre logiciel. A long terme, l’objectif est d’intégrer le plus simplement et le plus efficacement possible ces drones dans les forces armées.
Cécile Michaut
Le site du projet Action : action.onera.fr



