
![]()
TERRISCOPE est une plateforme mutualisée de recherche en télédétection optique aéroportée pour la caractérisation de l’environnement et des surfaces continentales à partir d’avions et de drones. Elle a pour objectifs de mettre à disposition de la communauté un ensemble de capteurs optiques aéroportés au meilleur niveau de l’état de l’art afin de conduire des recherches avec ces capteurs, et de favoriser le développement de services basés sur la télédétection aéroportée, en particulier par drones.
La plateforme Terriscope constitue un moyen unique de télédétection passive et active aéroportée permettant de mener aussi bien des recherches scientifiques (étude de l’environnement naturel ou artificiel entourant une activité anthropique), que travaux plus appliqués notamment ceux liés à la surveillance, la sécurité et la défense.
La plateforme TERRISCOPE a été cofinancée par l’Union européenne (Fonds Européen de Développement Régional), la Région Occitanie, l’ONERA, et quatre industriels ayant investi en nature dans le projet : SOFRADIR (désormais LYNRED), BOREAL, M3 SYSTEMS et LEOSPHERE.
![]()

La phase de développement s’est déroulée de 2016 à mi- 2019. La plateforme est désormais prête à être utilisée pour des projets collaboratifs académiques, industriels ou institutionnels.
Contact : Yannick.Boucher @ onera.fr
La plateforme TERRISCOPE est composée de drones et d’un ensemble de capteurs optiques de hautes performances : imageurs hyperspectraux, imageurs visibles multispectraux très haute résolution spatiale, imageurs infrarouges thermiques mono- bi- et multi-bandes, lidars topographiques 3D, LiDAR vent. Ces capteurs sont déclinés en version « avion » et version « drone » (à l’exception du lidar Vent).

Caméra hyperpsectrale AISA Fenix 1k pour avion intégrée dans l’ATR42 de SAFIRE*
Une tête optique couvrant le domaine 0.38-2.5µm, acquisitions push-broom visée nadir.
Résolution spectrale : 3,4nm (VNIR), 14nm (SWIR)
Champ de vue 40°, 1024 pixels perpendiculairement à la trace, IFOV 0,681 mrad
 Caméra hyperspectrale HySpex Mjolnir 620 FR pour drone intégrée dans le BOREAL
Caméra hyperspectrale HySpex Mjolnir 620 FR pour drone intégrée dans le BOREAL
Deux têtes optiques couvrant le domaine 0.4-2.5µm,
acquisitions push-broom visée nadir
VNIR : Résolution spectrale : 4nm, champ de vue 20°,
1280 pixels perpendiculairement à la trace, IFOV 0,27 mrad
SWIR : Résolution spectrale 6nm, champ de vue 20°,
640 pixels perpendiculairement à la trace, IFOV 0,54 mrad

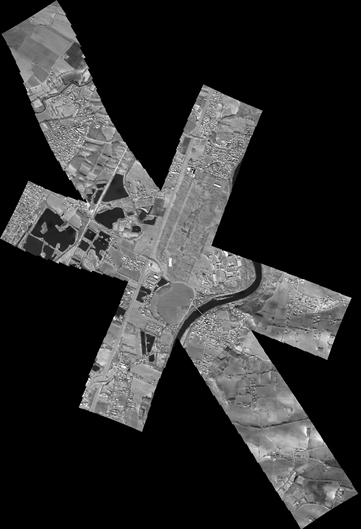
Mosaïque hyperspectrale VNIR en fausses couleurs (Mauzac)
obtenue avec la caméra AISA Fenix sur l’ATR42 de SAFIRE
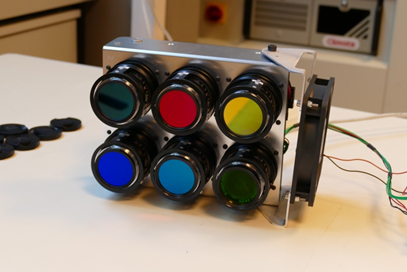 Caméra multispectrale VNIR (CamLight DELAIR)
Caméra multispectrale VNIR (CamLight DELAIR)
Ensemble de 6 caméras, chacune équipée d’un détecteur CMOS global shutter de 47 million de pixels.
Filtres spectraux amovibles.
Configuration avion : Champ de vue 66°x52°, 7920 x 6004 pixels, IFOV 0,164 mrad
Configuration drone : Champ de vue 66°x52°, 3960 x 3002 pixels, IFOV 0,329 mrad
 Caméra multispectrale IR thermique TELOPS MS-IR VLW (8 bandes entre 8 et 12 µm) intégrée dans le POD BUSARD de l’ONERA
Caméra multispectrale IR thermique TELOPS MS-IR VLW (8 bandes entre 8 et 12 µm) intégrée dans le POD BUSARD de l’ONERA
Roue porte filtre (MS-IR VLW) avec 2 jeux de 4 filtres (8,25-8,75µm; 8,80-9,40µm; 10.3-11.0µm; 11.4-12.4µm)
Configuration haute résolution : champ 5,5° x 4,4 °, 320 x 256 pixels, IFOV 0,30 mrad
Configuration grand champ : champ 42° x 34°, 320 x 256 pixels, IFOV 2,31 mrad

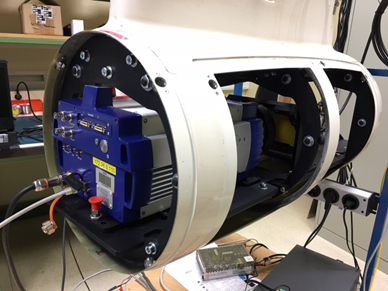
Caméra IR cryogénique SOIE (3-5 µm) intégrée dans le BOREAL
Matrice de détection Bande II SOFRADIR associée à une combinaison optique d’imagerie grand champ de conception ONERA
Champ de vue 60° x 48°, 640 x 512 pixels, IFOV 1,63 mrad, fréquence d’acquisition jusqu’à 25 Hz
Mosaïque IR sur le site de Mauzac
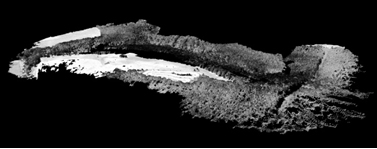
Reconstruction 3D à partir d’images SOIE sur le site d ’Esperce

Zoom sur une partie de la zone

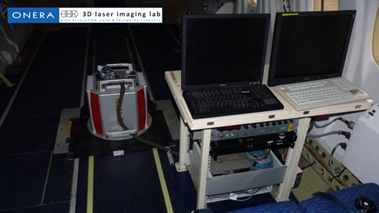

LDAR 3D RIEGL 1560i intégré dans l’ATR42 de SAFIRE
Lidar télémétrique à onde complète, double scan, 1.33 million de points de mesure./s, étalonné en réflectance
Comprend également 1 camera visible, 1 caméra NIR, 1 IMU/GNSS. Hauteur max de hauteur 3800m (réflectance sol ~20%), précision 20 mm. Données géoréférencées

LiDAR VUX-1-SYS intégré dans le BOREAL
Lidar 3D multi échos (16 bits), avec système
d’acquisition et de commande.
Hauteur max 820m (réflectance sol ~20%),
précision sol 15 mm; 750 000 de pt de mes./s
IMU/GNSS; données géoréférencées
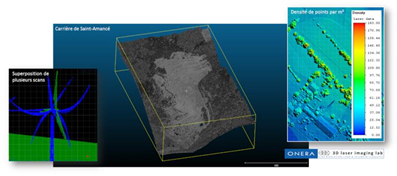
Exemple de résultats obtenus avec le LiDAR VUX-1-SYS
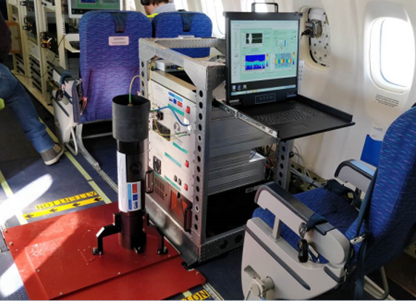
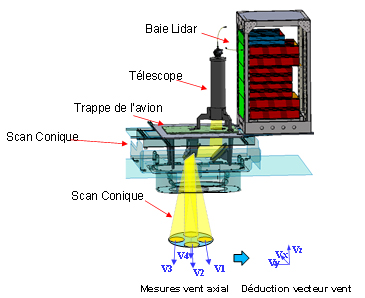
LiDAR vent LIVE intégré dans l’ATR42 de SAFIRE
Lidar Doppler haute puissance aéroporté pour la mesure du profil de vent de l’avion (5-7km) jusqu’au sol.
source laser fibrée 1,5µm haute énergie utilisant un laser Maitre fourni par la société Leosphere sous forme de contribution en nature
Précision de vitesse estimée: verticale<0,13m/s ; horizontale<0,5m/s
Résolution horizontale de 3km, résolution verticale de 100m.
Cadence de mesure : 20s
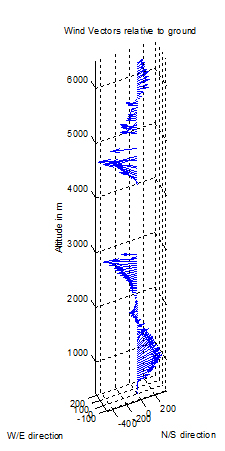
Reconstitutions du vent, vitesse et direction, sous la trace de l’avion
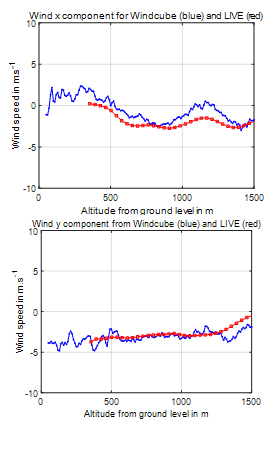 Comparaison de mesures LiDAR LIVEet LiDAR sol dans la couche limite
Comparaison de mesures LiDAR LIVEet LiDAR sol dans la couche limite
Pour les porteurs de type avion piloté, TERRISCOPE s’appuie principalement sur les avions de ses partenaires, en particulier SAFIRE*, et sur son moto-planeur « Busard ».
Un K75 de Deimos-Elector (voilure fixe) et deux drones hélicoptères YAMAHA Fazer R sont basés au DTIS Toulouse, et quatre Boreal (voilure fixe) sont basés au DOTA Toulouse. Les capteurs de TERRISCOPE sont intégrés ou ont vocation à être intégrés dans ces drones en fonction des besoins.

K75-Titan de DEIMOS-Elecnor
Une unité : MTOW ~80 kg
Charge utile 35 kg Autonomie > 350 km
Capacité d’intégration de 3 à 4 capteurs (classe 3-7 kg)

Yamaha Fazer R
2 unités : MTOW ~100 kg
Charge utile 40 kg Autonomie ~ 40 km
Dronisation DTIS/AEI
Capacité d’intégration de 3 à 4 capteurs (classe 3-7 kg)


Drone BOREAL de l’ONERA
MTOW 25 kg - Charge utile 7/10 kg, autonomie : 800 km.
Emport de 1 ou 2 capteurs par porteur, capacité de vol simultanée de 2 avions
4 UAV, 1 catapulte, une station sol
Des modules de traitements des données ont également été approvisionnés, développés ou adaptés
- Corrections radiométriques et atmosphériques
- Géoréférencement, mosaïquage et registration
- Développements spécifiques pour le LiDAR Vent
ainsi que des moyens de caractérisation et d’étalonnage (géométrique, radiométrique, spectral) dédiés aux différents capteurs.

Traitement des données : Images hyperspectrales et infrarouges thermiques acquises sur le Centre du Fauga-Mauzac, avant et après régistration


Exemple de moyens d’étalonnage
Corps noir pour étalonnage des caméras IR de TERRISCOPE
Sphère intégrante pour étalonnage radiométrique des caméras hyperspectrales
* L’Unité Mixte de Services SAFIRE regroupe les moyens humains, financiers et les trois avions de recherche du CNRS, de Météo-France et du CNES.



