
Janvier 2014, une nouvelle loi de commande, dite adaptative, est téléchargée à bord du satellite scientifique du Cnes "Picard" dédié à l’étude du soleil. Ce satellite, en mission au-delà de son espérance de vie nominale, s'est prêté à la démonstration de ces algorithmes innovants. Enjeux : améliorer les performances et surtout raccourcir les temps de conception.
Montage réalisé à partir d'une image © Cnes. Détails sur la mission Picard
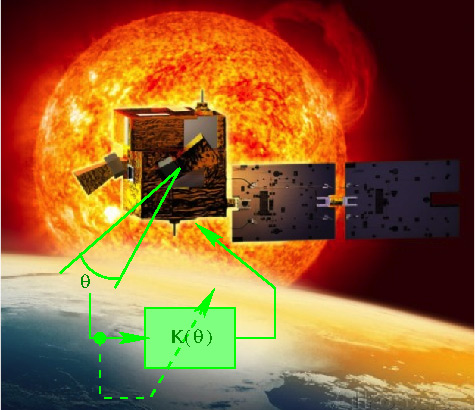
Pour un fonctionnement nominal des trois appareils de mesure constituant sa charge utile, le micro-satellite Picard doit pointer avec précision sur le soleil. Sur cette vue simplifiée, l’angle θ représente l’écart angulaire avec le pointage désiré. L’opérateur K(θ) représente la loi de commande assurant la régulation (le maintien du pointage).
Le satellite Picard doit pointer vers le soleil quelle que soit sa position en orbite ; il doit donc adapter en permanence sa position angulaire malgré des perturbations nombreuses et des signaux de mesure parfois défectueux.
L'innovation concerne la nature du dispositif de ce contrôle d'attitude : les règles de régulation sont adaptées dynamiquement, en fonction de l’écart à la position de pointage (les automaticiens disent que les gains sont adaptés en ligne en fonction de l'erreur mesurée).
En limitant la taille des gains aux « grands angles » (erreur importante) cette stratégie permet d’économiser les actionneurs* (et l’énergie du satellite), sans recourir aux approches plus classiques fondées sur la commutation de modes (passage avec à-coup du pointage « grossier » au pointage « fin »).
On obtient ainsi une loi de contrôle d’attitude continue pour laquelle une preuve de stabilité (donc de bon fonctionnement) peut être obtenue a priori. En outre, les lois de commande adaptative** ainsi conçues vont aussi pouvoir s’adapter efficacement aux variations de charges utiles. On améliore les performances et surtout, on raccourcit le temps de conception, pour un cycle de développement plus rapide.
Ce succès rencontré aujourd’hui dans le domaine spatial a été rendu possible grâce aux travaux de thèse d’Alexandru-Razvan Luzi, co-encadrés à Toulouse par Jean-Marc Biannic (ONERA/DCSD) et Dimitri Peaucelle (LAAS-CNRS) avec l'aide précieuse de deux ingénieurs experts du CNES-CST: Christelle Pittet et Jean Mignot.
En trois ans d'étude à peine, cette nouvelle architecture de commande est passée de l'idée théorique à la réalisation pratique sur un engin complexe et exigeant.
Contact Onera : Jean-Marc Biannic, jean-marc.biannic \@/ onera.fr
Notes
* Commande adaptative : Dans le monde aéronautique, la commande adaptive a connu un succès éphémère dans les années 1970 pour céder rapidement la place, suite à des expérimentations malheureuses, aux techniques de commande robuste que nous connaissons encore aujourd’hui et pour lesquelles l’expertise de l’Onera est largement reconnue. On peut cependant s’attendre dans un futur assez proche à un mariage réussi entre les techniques adaptatives d’une part et les techniques de commande robustes d’autre part. Un tel mariage aurait pour ambition de rendre « certifiables » les lois de commande adaptatives. Nul doute aussi que l’automatisation croissante des drones, secteur dans lequel l’Onera joue un rôle clé, permettra d’accélérer ce processus à moindre risque et à moindre coût.
** Actionneur de satellite : dispositif capable de créer un couple pour corriger l’attitude ou l’orientation du satellite en fonction des besoins.
En fonction des besoins, quatre types d’actionneurs peuvent être utilisés sur un satellite : les jets de gaz, les roues à inertie, les actionneurs gyroscopiques et les magnéto-coupleurs. Sur le satellite Picard, on utilise trois roues à inerties pour effectuer les corrections principales sur un horizon court-terme. Cependant, dès leurs vitesses maximales atteintes, ces roues ne produisent plus de couple (saturation en vitesse). Il est donc essentiel, lors de la conception des lois de contrôle, de gérer la capacité d’actionnement des roues. Notons, sur un horizon plus long terme, une désaturation des roues peut être réalisée via un dispositif d’actionnement complémentaire par couplage magnétique.

