
An autonomous drone is something that has become almost commonplace. However, getting several ground, sea or aerial drones to cooperate for a specific mission remains a challenge.
Number 56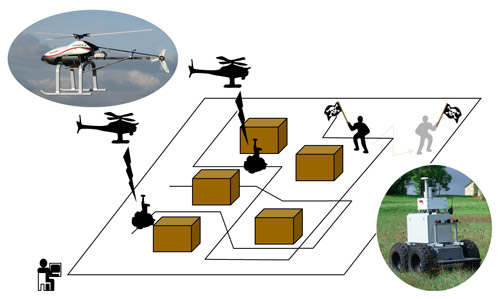
In this urban scenario, cooperation is the key to the success of the mission conducted by autonomous air and ground drones
Drones are valuable tools for identifying a combat scene, searching for people in danger, or even securing an area. Their effectiveness will be greatly increased if instead of acting alone, they are able to cooperate with other drones autonomously. This is the objective of the Action project commissioned by the French Defence Procurement Agency (DGA) and conducted by ONERA in Toulouse, in partnership with the Laboratory for Analysis and Architecture of Systems (LAAS-CNRS) also in Toulouse.
 |
 |
 |
 |
Drones participating in the Action project: Ressac, the air drone (ONERA); Mana, the ground drone (LAAS-CNRS); Daurade, the submarine drone (DGA)
When we speak of drones, we immediately think of flying machines. However, they can also be ground, submarine or surface maritime drones. All of these drones move in different environments and are complementary. "How can a ground drone and an aerial drone cooperate, for example to survey an area?” asks Magali Barbier, project manager for ONERA. "We are working on on-board software for these drones, so that they can jointly carry out missions as autonomously as possible, minimising contact with human operators."
Before being able to interact, drones must first be autonomous. Their software must therefore include a first "mono-drone" layer to manage each entity, allowing it among other functions to avoid obstacles. This involves, in particular, recovering data from its sensors, from other vehicles and from the operator; planning a series of tasks (displacements, perception, etc.) and triggering these actions depending on the progress of the mission. The Action project is aimed at designing and developing a "multiple drone" planning, supervision and coordination software architecture to manage cooperation. Thus, if a ground drone is not able to reach an expected location, it can call upon an aerial drone to map the area over its position and transmit the new data regarding the environment to the ground. The "multiple drone" layers of the various drones communicate with each other for effective cooperation and for the achievement of the mission by adapting to events. And within a same drone, its "mono" and "multi" parts interact, for example, to decide when to initiate an exchange of information.
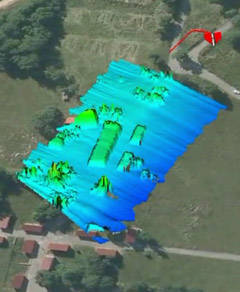 The Ressac drone has mapped the environment around the ground drone to allow it to find a new route |
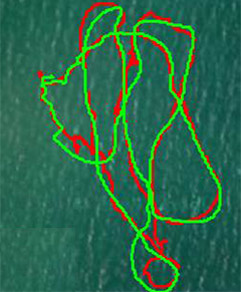 Tracking of a ship by the Ressac drone (green: GPS, red: vision) Tracking of a ship by the Ressac drone (green: GPS, red: vision) |
"The first difficulty is related to communications between drones”, says the researcher. “This is rarely perfect, for example, the links between ground drones may be hampered by a building. The choice in the Action project is to schedule regular rendezvous between the drones, on the one hand, and with the operator on the other hand, to enable the progress of the mission to be monitored. If a drone is absent from a rendezvous, strategies are developed: should they stay put and wait for communications to recover? Or should they go to search for it and, if so, where?”. Another difficulty: knowing its location while not using GPS information. Each ground drone therefore relies on its own sensors to move in its environment and on the information provided by the other drones to improve the knowledge of their respective positions.
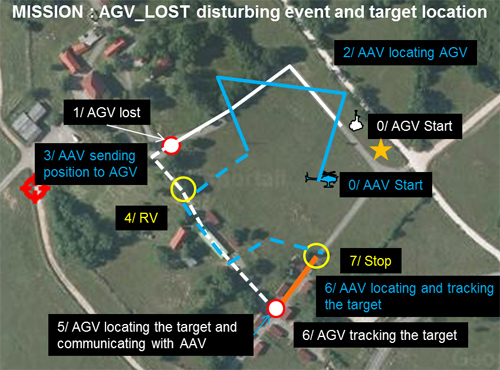
Ground drone (AGV - Autonomous Ground Vehicle) conducting a mission tracking a target on the ground; for this purpose it receives the aid of an aerial drone (AAV - Autonomous Aerial Vehicle).
To test the cooperation between drones, researchers are in contact with the chiefs of staff, with which they consolidate mission objectives, such as the identification and tracking of intruders in a rurban area. This mission is first simulated on a computer and then tested with real vehicles in the field, with increasingly more drones. Today, it was achieved using an aerial drone cooperating with a ground drone, and with an aerial drone cooperating with two ground drones. For maritime and aerial drones, the first mission will be to locate mines possibly set in place by a ship; the second will be to find the wreckage of a recently sunk chemical tanker (editor's note : done in the end of 2014). “The special feature of all of these missions is the great autonomy of the team of drones”, says Magali Barbier. “The idea is to send drones to carry out surveillance and search missions, etc., telling them to ‘sort things out’ on their own. We wish to reduce the number of operator actions, even if the number of drones increases."
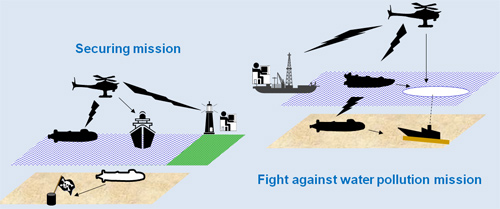
The next missions will test the decision-making architecture of the Action project in a maritime context
These "multiple drone" software applications can be integrated to any drone with an open software (of which we know the programming) that already has a minimum amount of individual autonomy. Each drone with its own software can therefore coordinate efforts with other drones, even if they have a different software. A long-term goal is to integrate these drones into the armed forces as simply and efficiently as possible.
Cécile Michaut - September, 2014

