
Domaines scientifiques
- ONERA
- Recherche - Aéronautique Espace Défense
- Domaines scientifiques
- Traitement de l'information et systèmes
Traitement de l'information et systèmes
Le domaine scientifique TIS

Philippe Bidaud
Directeur scientifique
du domaine Traitement de l'information et systèmes
>> stages <<
>> thèses <<
Avancées récentes
 Création du centre de recherche virtuel AI4AE avec le DLR (octobre 2019) Les deux centres de recherche français et allemand ont initié une coopération en "IA et applications en ingénierie aérospatiale", en créant un centre de recherche virtuel qui aura vocation à contribuer à la transformation numérique de l'industrie aéronautique et spatiale.
Création du centre de recherche virtuel AI4AE avec le DLR (octobre 2019) Les deux centres de recherche français et allemand ont initié une coopération en "IA et applications en ingénierie aérospatiale", en créant un centre de recherche virtuel qui aura vocation à contribuer à la transformation numérique de l'industrie aéronautique et spatiale.
Voir www.onera.fr/fr/ai4ae




 L’ONERA se rapproche de la région Nouvelle Aquitaine (décembre 2019) Signature d’une convention de partenariat, visant à favoriser et intensifier les collaborations en matière de transformation digitale pour l’industrie aéronautique, espace, défense de la région. L’ONERA engage son potentiel de recherche sur des sujets comme les jumeaux numériques, la maintenance, la production agile…
L’ONERA se rapproche de la région Nouvelle Aquitaine (décembre 2019) Signature d’une convention de partenariat, visant à favoriser et intensifier les collaborations en matière de transformation digitale pour l’industrie aéronautique, espace, défense de la région. L’ONERA engage son potentiel de recherche sur des sujets comme les jumeaux numériques, la maintenance, la production agile…
TIS en résumé
Ce domaine recouvre ce qui est usuellement désigné par les Sciences et technologies de l'information et de la communication (STIC) dont les principales composantes sont l'automatique, le traitement du signal et des images, la robotique, la simulation numérique, la conception et l’optimisation des systèmes et des procédés, l'ingénierie des systèmes informatiques, l’ingénierie des connaissances et des processus cognitifs.
Les travaux de recherche s'adressent pour bonne part à la conception des systèmes aéronautiques et aérospatiaux, des systèmes de défense et de surveillance, de sécurité ainsi qu'au déploiement de ces systèmes dans des missions complexes, au traitement de données massives issues de capteurs embarqués et à l'élaboration de connaissances sur des phénomènes à grande échelle. Ils présentent un caractère générique qui leur offre un potentiel de diversification important notamment dans les systèmes de transport et de production.
Ces travaux visent – au travers des méthodes et techniques innovantes du numérique et des convergences entre modélisation, simulation et données – des avancées qui permettront d'atteindre de nouvelles performances intrinsèques aux systèmes considérés. Ils portent également sur des enjeux relatifs à leur intégration dans les systèmes d'information et de communication, aux besoins d'interactivité avec les utilisateurs mais aussi de sûreté, de sécurité, d’autonomie, de coordination des systèmes.
Bon nombre de ces travaux donnent lieu à des développements expérimentaux (mini-drones et drones, robots terrestres et sous-marins, interfaces d'aide au pilotage, réseaux de capteurs intelligents, etc.). D'autres font l'objet de développements de plates-formes logicielles (trafic aérien, battle lab, conception MDO, etc.) pour réaliser des maquettes numériques et évaluer les performances opérationnelles par la simulation physique.
Adjoints scientifiques des départements

Thématiques TIS
Le domaine TIS regroupe 8 thématiques scientifiques essentiellement réparties sur le département Traitement de l’information et systèmes DTIS (et pour une thématique le DAAA département Aérodynamique, aéroélasticité, acoustique).
- Identification et commande des systèmes DTIS
- Perception et traitement de l’information DTIS
- Robotique et autonomie DTIS
- Sûreté et sécurité des systèmes cyber-physiques DTIS
- Ingénierie des systèmes et des logiciels DTIS
- Intelligence artificielle et décision DTIS
- Conception et optimisation des systèmes DTIS
- Ingénierie cognitive et interaction homme-système DTIS
Identification et commande des systèmes
[CNU 61] [CoCNRS 7]
DTIS Sylvain Bertrand, Clément Roos (@ onera.fr)
- Commande optimale
- Commande adaptative robuste
- Commande prédictive
- Commande distribuée
- Analyse de systèmes hybrides
- Identification multicritère par hybridation
- Estimation d’état et reconstruction de trajectoires
- Détection de fautes et reconfiguration
- Modélisation LFT à l'analyse de la robustesse
- Commande Hinf structurée robuste et auto-séquencée
- Approximation de systèmes de grande dimension
- Commandes référencées capteurs
- Commande tolérante aux fautes
- Commande et estimation distribuées pour les systèmes multi-agents
Exemples
 Toolboxes SMAC, MORE et GENETIC SMAC - Synthèse robuste et d'analyse de la robustesse ; MORE - Réduction et approximation de modèles dynamiques ; GENETIC - Optimisation pour l’identification
Toolboxes SMAC, MORE et GENETIC SMAC - Synthèse robuste et d'analyse de la robustesse ; MORE - Réduction et approximation de modèles dynamiques ; GENETIC - Optimisation pour l’identification
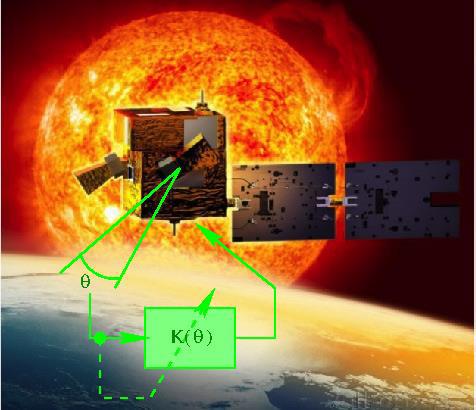 Mission PICARD Dispositif de contrôle d'attitude : les règles de régulation sont adaptées en fonction de l‘écart à la position de pointage
Mission PICARD Dispositif de contrôle d'attitude : les règles de régulation sont adaptées en fonction de l‘écart à la position de pointage
 Projet ATTOL Navigation autonome « taxi » et atterrissage
Projet ATTOL Navigation autonome « taxi » et atterrissage
Perception et traitement de l'information
[CNU 27, 61] [CoCNRS 7]
DTIS Luc Meyer, Olivier Herscovici (@ onera.fr)
- Traitement de données hétérogènes massives
- Fusion de données par réseaux bayésiens
- Apprentissage pour l'analyse d'image et la mesure par imagerie
- Outils pour la navigation hybride certifiée
- Traitements proches capteurs et la co-conception capteur-traitement
- Mesure par imagerie pour la physique expérimentale (PIV-BOS)
- Pistage, fusion de données, réseaux de capteurs et tenue de situation
- Filtrage non linéaire et fusion de données pour la navigation
- Exploitation d'images de télédétection aériennes ou satellitaires pour l'observation de l'environnement
- Vision embarquée pour l'autonomie des engins
Exemples
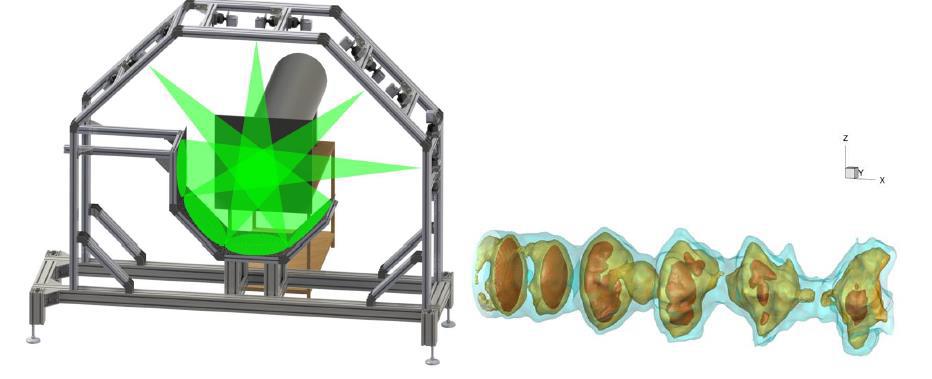 Mesure BOS3D en soufflerie. 6 à 12 caméras synchronisées devant des fonds texturés. Système tomographique permettant la mesure quantitative 3D instantanée de la masse volumique.
Mesure BOS3D en soufflerie. 6 à 12 caméras synchronisées devant des fonds texturés. Système tomographique permettant la mesure quantitative 3D instantanée de la masse volumique.
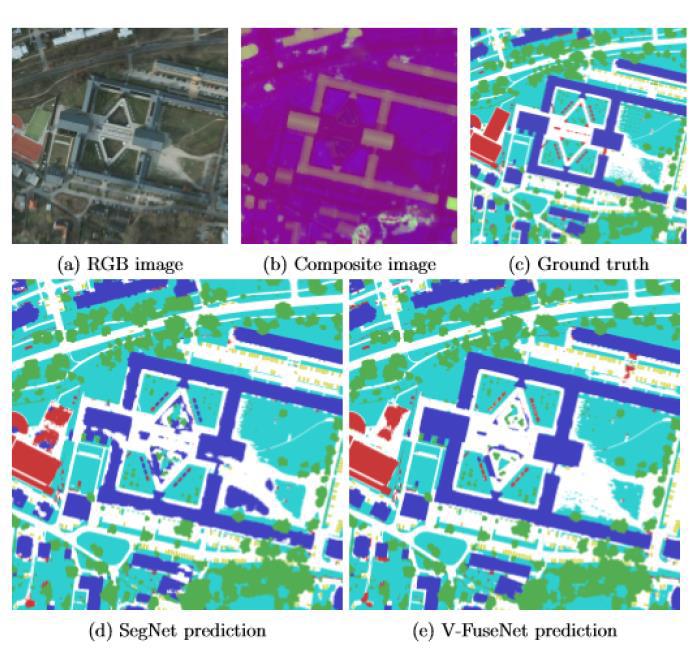 Interprétation d'images multi-sources et fusion de données Comparaison de différentes méthodes de classification automatique basées apprentissage à partir de données optiques multi sources en zone urbaine.
Interprétation d'images multi-sources et fusion de données Comparaison de différentes méthodes de classification automatique basées apprentissage à partir de données optiques multi sources en zone urbaine.
Robotique et autonomie
[CNU 27, 61] [CoCNRS 7]
DTIS Christophe Grand, Julien Marzat (@ onera.fr)
- Architectures de décision multirobots
- Résilience et robustesse de fonctionnement des systèmes robotiques
- Flottes de robots coopératifs
- Apprentissage par renforcement
- Traitements Architecture de programmation et de simulation
- Navigation autonome
- Commande référencée capteur(s)
- Coordination des systèmes multirobots
- Autonomie et décision
Exemples
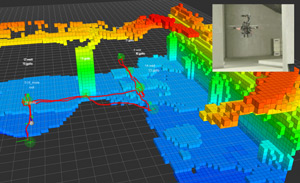
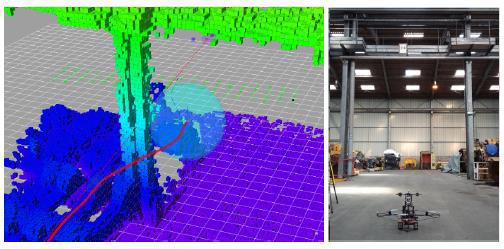 PRI DROSOFILES Vision géométrique embarquée et d'estimation d‘état pour modéliser en 3D l'environnement observé . Guidage-pilotage, stabilisation et évitement des obstacles inconnus ou dynamiques
PRI DROSOFILES Vision géométrique embarquée et d'estimation d‘état pour modéliser en 3D l'environnement observé . Guidage-pilotage, stabilisation et évitement des obstacles inconnus ou dynamiques
*PRI Partenariat recherche-industrie
 ACTION/MUST Une architecture décisionnelle pour atteindre un haut niveau de résilience dans le déploiement de systèmes multi-robots autonomes basée sur planificateur hybride HiPOP (Hierarchical Partial Order Planning) qui organise les actions sous une forme hiérarchique d’exécution et réparation de plans d’actions.
ACTION/MUST Une architecture décisionnelle pour atteindre un haut niveau de résilience dans le déploiement de systèmes multi-robots autonomes basée sur planificateur hybride HiPOP (Hierarchical Partial Order Planning) qui organise les actions sous une forme hiérarchique d’exécution et réparation de plans d’actions.
COPERNIC Lab - Contrôle et perception pour la navigation autonome et la coopération inter-véhicules (site en anglais)
Sûreté et sécurité des systèmes cyber-physiques
[CNU 27, 61] [CoCNRS 7]
DTIS Christel Seguin, Loïc Brevault (@ onera.fr)
- Modélisation et évaluation formelles de la sûreté de fonctionnement des systèmes
- Estimation probabiliste des risques et de la la fiabilité des systèmes
- Mécanismes de tolérance aux fautes, pronostic santé et diagnostic de pannes
- Argumentation de sûreté de fonctionnement et certification
Exemples
Convention DGAC PHYDIAS sur les méthodes d'analyse de sécurité des drones https://w3.onera.fr/PHYDIAS/
Outils DROSERA d'analyse des zones de retombées des drones après accident
Analyse de données de traffic aérien et des risques de collision
Pronostic santé lanceurs
Ouvrages
 Estimation of Rare Event Probabilities in Complex Aerospace and Other Systems : A practical Approach Jérôme Morio, Mathieu Balesdent
Estimation of Rare Event Probabilities in Complex Aerospace and Other Systems : A practical Approach Jérôme Morio, Mathieu Balesdent
 Model-Based Safety and Assessment - Conference proceedings, Editeurs: Christel Seguin, Marc Zeller, Tatiana Prosvirnova
Model-Based Safety and Assessment - Conference proceedings, Editeurs: Christel Seguin, Marc Zeller, Tatiana Prosvirnova
Ingénierie des systèmes et des logiciels
[CNU 27] [CoCNRS 6, 7]
DTIS Frédéric Boniol, Romain Kervarc (@ onera.fr)
- Les méthodes formelles pour la vérification / certification de l'intelligence artificielle
- L'intelligence artificielle pour accélérer les méthodes formelles
- Vérification des codes VHDL
- Ingénierie des grands codes de calculs
- Réseaux sans fil embarqués
- Méthodes et langages pour le développement de systèmes et de logiciels
- Langages formels pour la modélisation des exigences et la spécification
- Modélisation de systèmes de contrôle commande
- Vérification & certification de l’embarqué
- Analyse des systèmes temps réels
- Analyse des réseaux avioniques
- Architectures many-core
- Architectures de simulation
Exemples
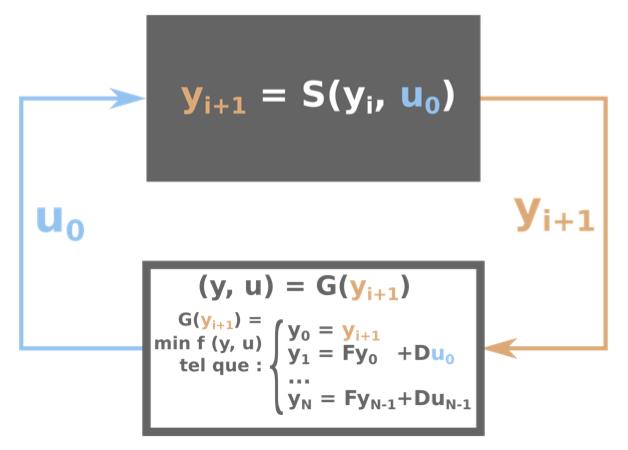 Vérification de contrôleurs Développement d'un langage impératif formel de haut niveau (de type pseudo-code), appéle PySil, contrôleur MPC, utilisant l'algorithme du point intérieur.
Vérification de contrôleurs Développement d'un langage impératif formel de haut niveau (de type pseudo-code), appéle PySil, contrôleur MPC, utilisant l'algorithme du point intérieur.
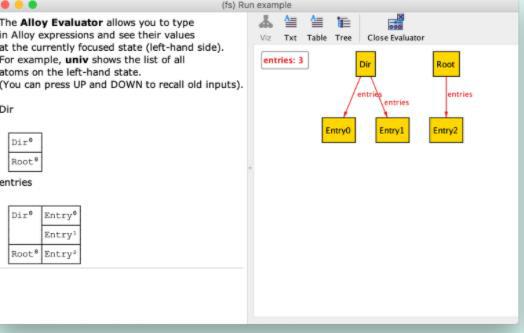 Langage Electrum Un langage pour la spécification en logique relationnelle bornée (une logique du premier ordre avec termes relationnels et dont les domaines d'interprétation sont bornés par l'utilisateur) pour la vérification automatisée de propriétés et le comportement de code par traduction en problème de satisfiabilité pour la logique propositionnelle.
Langage Electrum Un langage pour la spécification en logique relationnelle bornée (une logique du premier ordre avec termes relationnels et dont les domaines d'interprétation sont bornés par l'utilisateur) pour la vérification automatisée de propriétés et le comportement de code par traduction en problème de satisfiabilité pour la logique propositionnelle.
Intelligence artificielle et décision
[CNU 27, 61] [CoCNRS 6, 7]
DTIS Stéphane Herbin, Gauthier Picard (@ onera.fr)
- IA de confiance pour la robustesse la certification
- IA, modèles physiques et connaissances
- Apprentissage interactif
- Planification dynamique
- Représentation des connaissances pour le raisonnement et la décision
- Planification dans l’incertain (applications au domaine spatial, ATM, industrie)
- Décision distribuée
- Apprentissage automatique sur les données hétérogènes
Exemples
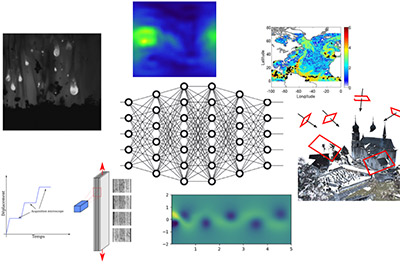 DELTA Un environnement logiciel visant à faciliter l'utilisation d’apprentissage profond (CNN, RNN, GAN) dans les métiers de l'ONERA. DELTA a été utilisé pour la sémantisation de nuage de points, la prédiction météo (risque foudre et contenu électronique de l'ionosphère), l'étude de propergol en combustion, le comptage de fissures dans des matériaux composites, et enfin, en mécanique des fluides. DELTA est principalement basé sur Pytorch (bien qu'une version Caffe subsiste) et s'appuie sur un cluster ONERA de GPU Nvidia de nouvelle génération.
DELTA Un environnement logiciel visant à faciliter l'utilisation d’apprentissage profond (CNN, RNN, GAN) dans les métiers de l'ONERA. DELTA a été utilisé pour la sémantisation de nuage de points, la prédiction météo (risque foudre et contenu électronique de l'ionosphère), l'étude de propergol en combustion, le comptage de fissures dans des matériaux composites, et enfin, en mécanique des fluides. DELTA est principalement basé sur Pytorch (bien qu'une version Caffe subsiste) et s'appuie sur un cluster ONERA de GPU Nvidia de nouvelle génération.
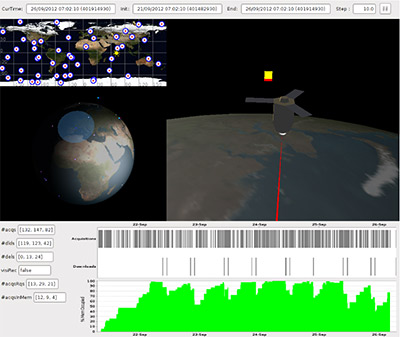 InCell Outil de Programmation par Contraintes permettant de gérer plusieurs types de ressources renouvelables. Il considère aussi bien les ressources disjonctives, les ressources cumulatives et les ressources présentant une durée d'appropriation. Les conflits sur l'utilisation des ressources sont alors résolus en définissant un ordre de priorité entre les activités pour leur ordonnancement. De plus l'outil comprend un invariant pour la recherche locale différentiable à base de contraintes qui transforme un ordre de priorités en ordonnancement complet et gère de manière incrémentale cet ordonnancement en cas de changement dans l'ordre. Sur cette base plusieurs voisinages et stratégies de recherches peuvent être utilisées et de nouvelles meilleures bornes supérieurs ont été obtenues pour plusieurs benchmarks d'ordonnancement. Le domaine spatial est un cadre d'application privilégié d'InCELL.
InCell Outil de Programmation par Contraintes permettant de gérer plusieurs types de ressources renouvelables. Il considère aussi bien les ressources disjonctives, les ressources cumulatives et les ressources présentant une durée d'appropriation. Les conflits sur l'utilisation des ressources sont alors résolus en définissant un ordre de priorité entre les activités pour leur ordonnancement. De plus l'outil comprend un invariant pour la recherche locale différentiable à base de contraintes qui transforme un ordre de priorités en ordonnancement complet et gère de manière incrémentale cet ordonnancement en cas de changement dans l'ordre. Sur cette base plusieurs voisinages et stratégies de recherches peuvent être utilisées et de nouvelles meilleures bornes supérieurs ont été obtenues pour plusieurs benchmarks d'ordonnancement. Le domaine spatial est un cadre d'application privilégié d'InCELL.
Simulation sur cinq jours d'une planification par InCELL d’acquisitions et de transfert d'informations au sol pour une mission d'observation de la Terre.
Conception et optimisation des systèmes
[CNU 61] [CoCNRS 7]
DTIS DAAA Mathieu Balesdent, Pierre-Marie Basset (@ onera.fr)
- Propagation d'incertitudes et gestion de la multi-fidélité
- Modèles hybrides et assimilation de données
- Réduction de modèles
- Coconception (aéronefs-opérations)
- Modélisation et techniques d’optimisation multidisciplinaire pour les systèmes aérospatiaux
- Méthodes et outils pour la conception et l'analyse de performances de systèmes
- Exploration de nouveaux concepts aérospatiaux et évaluation des performances
Exemples
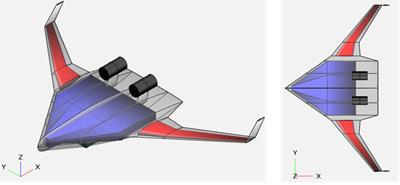
 CICAV Conception de nouvelles architectures de type aile volante avec propulsion BLI à l’aide techniques de MDAO.
CICAV Conception de nouvelles architectures de type aile volante avec propulsion BLI à l’aide techniques de MDAO.
 Eole Un système de lancement aéroporté de petits satellites orbite basse. Ce lanceur utilise une propulsion hybride, une structure composite haute performance, une avionique embarquant des fonctions d’autonomie de vol.
Eole Un système de lancement aéroporté de petits satellites orbite basse. Ce lanceur utilise une propulsion hybride, une structure composite haute performance, une avionique embarquant des fonctions d’autonomie de vol.
Ingénierie cognitive et interaction homme-système
[CNU 61, 69] [CoCNRS 7, 26]
DTIS Bruno Berberian, Thomas Rakotomamonjy (@ onera.fr)
- Pilotage à travers le sens haptique
- Analyse des performances des opérateurs lors de la supervision d'agents fortement automatisés
- Déterminants de la performance en situation d'urgence
- Détermination des corrélats neuraux des mécanismes de perception consciente
- Intégration multimodale impliqués dans la perception et le contrôle du mouvement propre
- Analyse de l’acceptabilité, la lisibilité et par extension l'utilisabilité des systèmes automatisme
Exemples
![]() Désorientation spatiale en aéronautique Études de mécanismes de compensation des phénomènes de désorientation par aides visuelles (synthétiques) et haptiques. Stimulation visuel et physique – Analyse des réactions du pilote par capture de la posture, orientation de la tête, activité oculomotrice, etc.
Désorientation spatiale en aéronautique Études de mécanismes de compensation des phénomènes de désorientation par aides visuelles (synthétiques) et haptiques. Stimulation visuel et physique – Analyse des réactions du pilote par capture de la posture, orientation de la tête, activité oculomotrice, etc.
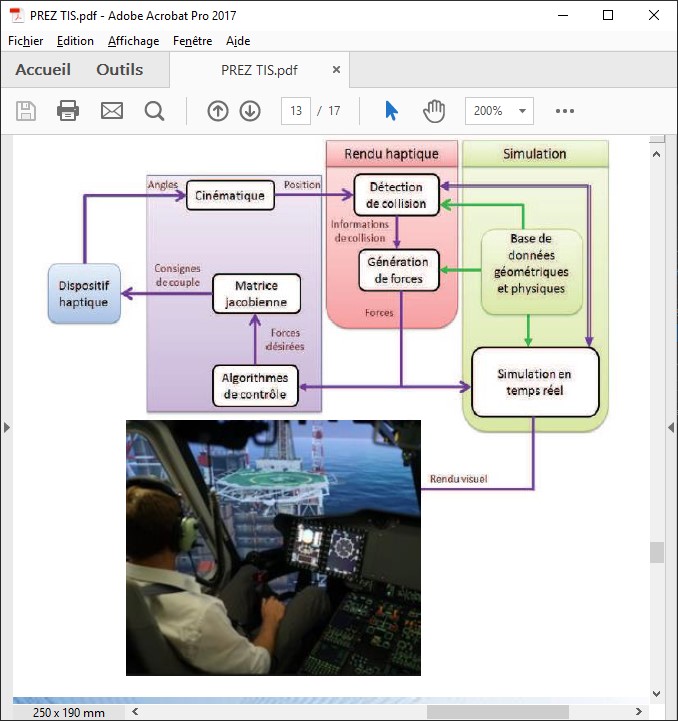 Aide au pilotage Retour d’effort sur interface haptique (stabilité du couplage – effet des retards) - Guides virtuels par simulation temps réel du comportement aéronef-environnement
Aide au pilotage Retour d’effort sur interface haptique (stabilité du couplage – effet des retards) - Guides virtuels par simulation temps réel du comportement aéronef-environnement
* CNU : relatif aux sections disciplinaires du Conseil national des universités (voir liste au CNU)
* CoNRS : relatif aux sections disciplinaires du Conseil national de la recherche scientifique, en vigueur au CNRS (voir CoNRS/sections)