- Accueil
- Actualités
- Un radar d'imagerie verticale à bord du "Busard"
Un radar d'imagerie verticale à bord du "Busard"
La plateforme aérienne pilotée Onera-Sagem est destinée à expérimenter de nouveaux systèmes pour drones. En cours d'intégration, le radar d'imagerie verticale.
Afin d’accompagner le développement des systèmes de drones, l’Onera et Sagem ont décidé d’acquérir à parts égales un motoplaneur Stemme S10-VT équipé de deux nacelles ou " pods ". Dans un premier temps, cette plate-forme aérienne pilotée, baptisée " Busard ", est destinée à expérimenter les charges utiles dites de " Nouvelle Génération " conçues pour capter les informations depuis le ciel, sur terre et sur mer, dans un environnement naturel ou urbain. La première version d’un radar d’imagerie verticale, développée dans le cadre du projet Drive (Drone Radar d’Imagerie VerticalE) est en cours d'intégration dans l’un des pods de Busard afin de procéder à des essais en vol en décembre.

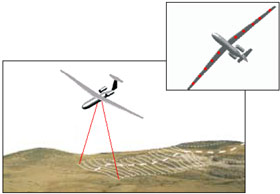
Le banc d'essai aéroporté ultra-léger Busard, équipé d'un pod
" Le concept de radar d’imagerie verticale permet d’assurer des missions sur tous les types de reliefs, en particulier les reliefs accidentés ou les zones urbaines, pour des applications duales civiles et militaires ", explique Hervé Jeuland, ingénieur de recherche au sein de l’unité Radars IMageurs et expérimentations (RIM) du département Electromagnétisme et radar (DEMR) et impliqué dans le développement de ce radar d’imagerie verticale. Complémentaire du SAR, ce type de système à visée verticale évite en effet les masquages rencontrés en visée latérale, un problème observé notamment par les troupes qui ont participé aux opérations de l’Otan dans des reliefs montagneux comme ceux des Balkans ou de l’Afghanistan.
Aujourd’hui, ce concept d’imagerie verticale utilisant un grand réseau d’antennes fait l’objet de différents travaux dans le cadre d’applications sur des drones. Ainsi la Darpa finance-t-elle le programme MTWIS (Millimeter Wave Targeting and Imaging Sensor) dont l’objectif est d’étudier un système actif ou passif d’imagerie 3D en visée verticale, en bande W (94 GHz) sur un drone de type Predator ou un équivalent pour la détection de cibles dans des scénarios de type zone urbaine. Parallèlement, un groupe de travail de l’Otan a lancé en 2004 un projet baptisé " High Performance passive Millimetre Wave Imaging " dont l’objectif est de concevoir un radiomètre en bande W utilisant un réseau d’antennes en croix réparties respectivement sur le fuselage et les ailes d’un drone Male de type Predator.
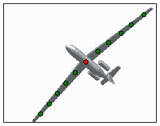
L'imagerie radar verticale à antenne répartie, ou souple
Prendre en compte les vibrations et les déformations
C’est en 2003, dans le cadre de Drive, un programme pluriannuel lancé par le DEMR, qu’a démarré l’étude d’un système radar d’imagerie à visée verticale. " Après avoir réalisé une étude de faisabilité au cours de la première année, nous avons consacré la suivante à des développements dans le domaine du traitement du signal et des mesures au sol. Une première version du radar est en cours d’intégration dans un pod du Busard afin de procéder à des essais en vol " en décembre, résume-t-il. A terme, l’objectif est de disposer d’un grand réseau d’antennes implantées sous les ailes du Busard et de l’utiliser en parallèle avec la technique SAR. En combinant ces deux systèmes - ce qui n’a encore jamais été réalisé - il sera alors possible d’obtenir une image radar 3D altimétrique innovante et riche en information.
L’une des principales difficultés est de parvenir à intégrer un réseau d’antennes sous les ailes de cet appareil. Les ailes de celui-ci sont en effet soumises à des déformations et des vibrations qui représentent autant de phénomènes qu’il va falloir compenser. " Ce problème nous conduit à évoquer le Projet de Recherche Fédérateur (PRF) GAD (Grande Antenne Déformable), lancé dès 1999, là encore par le DEMR. Dirigé par Dominique Medynski, GAD vise à identifier et compenser ces perturbations sur un grand réseau d’antennes. Dans un premier temps, ce projet va déboucher sur une application Guerre Electronique, sur le Busard, programmée pour 2007. Nous avons besoin de ces résultats pour les appliquer à notre grand réseau d’antennes ", indique Hervé Jeuland. Aussi l’équipe a-t-elle décidé dès le départ d’adopter une démarche incrémentale pour l’expérimentation du radar d’imagerie verticale. Ainsi le Busard ne comporte qu’une seule antenne pour la campagne d’essais de novembre.
Complexifier progressivement le réseau d’antennes
Au cours de ces essais, les ingénieurs de l’unité RIM auront non seulement réalisé de la visée verticale à l’aide de cette unique antenne, combinée avec un système d’acquisition et un système de navigation pour le recalage des données, mais aussi profité de l’opportunité de disposer d’un radar en bande millimétrique pour effectuer des visées latérales. " Au lieu de pointer l'antenne vers le bas, elle sera dépointée latéralement afin de pouvoir réaliser de l’imagerie SAR conventionnelle. Certes, la plate-forme Ramses permet de le faire depuis longtemps. La différence est que nous allons utiliser un radar compact, en bande millimétrique, et faire appel à la technologie FMCW (Frequency Modulated Continuous Wave), une solution qui présente l’avantage d’être à bas coût ", souligne-t-il.
Par la suite, il s’agira de complexifier progressivement le réseau d’antennes embarqué à bord du Busard, un réseau qui en comportera plusieurs dizaines, chacune d’entre elles possédant son module de réception, d’où l’émergence d’un système particulièrement complexe dont il faudra équilibrer toutes les phases. Parallèlement, l’équipe du projet GAD (Grande antenne déformable) commencera à travailler avec un nombre restreint d’antennes, quatre à cinq sous les ailes et un nombre identique sous le fuselage, disposées en forme de croix. " De la sorte, cette équipe pourra commencer à aborder cette problématique de compensation sur un porteur afin que nous puissions développer des solutions. Ce n’est qu’ensuite qu’il sera possible de passer à l’étape suivante, c’est-à-dire l’étude théorique des spécifications du réseau d’antennes ".
Le principe du radar d'imagerie verticale du projet DRIVE
Un agenda chargé pour Busard
Avant d’entamer cette expérimentation en décembre prochain, le Busard n'aura pas chômé. En effet, au printemps, il se faisait remarquer au salon du Bourget, avec démonstration en temps réel lors d'un vol quotidien de deux heures. Durant l’été (juillet à septembre), il a participé à une campagne baptisée " Feux de forêts " réalisée par les départements DOTA (Optique théorique et appliquée) et DEMR (Electromagnétisme), en collaboration avec Sagem et la Sécurité Civile ; cette campagne visait à utiliser des capteurs optroniques et infrarouges, embarqués à bord du Busard, pour détecter des incendies de forêts. Dans la foulée en octobre, le Busard a permis à Sagem de mettre au point un nouveau système d'hybridation Centrale inertielle / GPS. Fin novembre, une campagne baptisée " Voir et éviter ", menée à nouveau en collaboration avec Sagem mais aussi d’autres équipes dont le Lasmea, un laboratoire mixte CNRS/Université de Clermont-Ferrand est en cours avec la participation d'un avion plastron de l’Armée de l’Air. Il s’agit de faire de la détection et de l’évitement d’aéronefs en vol à l’aide d’une petite caméra infrarouge associée à une caméra vidéo et à un radar à 77 GHz. " Pour l'ensemble de ces essais, le Centre d’Essais en Vol (CEV) d’Istres assure totalement le pilotage de la machine et le conseil sur sa sécurité ", tient à souligner Hervé Jeuland.