DTIS - Traitement de l'information et systèmes
- ONERA
- Départements scientifiques
- DTIS - Traitement de l'information et systèmes
- Unités de recherche
DTIS - Unités de recherche
AEI | CASH | COVNI | CSAM | EDO | ICNA | IDCO | IGNC | M2CI | MACI | MARS | MIC | MIDL | RFDS | RIME | S2AD | SAPIA | SEAS | SIMS
Automatique, Expérimentation, Intégration (AEI)
L’unité AEI (Automatique, Expérimentation, Intégration) a pour objectif d'analyser et de renforcer les liens entre automatique et intégration, afin de faciliter le transfert des travaux amont réalisés à l'ONERA vers nos partenaires. En s'appuyant sur une grande diversité de compétences couvrant les principales disciplines de l'automatique, l'unité mène des études théoriques et développe des outils capables de répondre aux cahiers des charges et aux besoins spécifiques des acteurs de l'aérospatial et de la robotique. Elle combine et adapte des techniques décrites dans la littérature, mises au point en son sein ou dans d'autres unités de recherche, afin de prendre en compte les contraintes d'intégration inhérentes à toute activité expérimentale.
Dans cette logique, l'unité AEI se caractérise par une forte activité expérimentale, qui s'articule autour des plateformes hétérogènes du laboratoire ReSSAC. A travers ces démonstrateurs technologiques développés par ses soins, l'unité AEI explore une grande diversité de méthodes de l'automatique. L’exploitation des résultats expérimentaux permet de confronter les résultats théoriques à la réalité du terrain et offre un retour d’expérience précieux permettant à l'ONERA d'itérer sur ses méthodes et outils. Cette démarche a pour finalité de rendre les systèmes étudiés plus performants, plus sûrs et plus robustes/résilients aux aléas.
Conception Avancée de Systèmes Hypersoniques (CASH)

Conception Avancée de Systèmes Hypersoniques
L’unité CASH (Conception Avancée de Systèmes Hypersoniques) mène principalement des travaux de définition et d’évaluation de performances de nouveaux concepts de véhicules aérospatiaux aérobies hypersoniques pour des applications militaires et civiles (missiles, avions militaires et civils, lanceurs réutilisables, …). Ces travaux vont de l’étude d’avant-projet aux essais au sol ou en vol.
Pour les mener à bien, elle dispose d’une compétence système et d’une approche multidisciplinaire lui permettant de concevoir des véhicules d’architectures variées, d’évaluer leurs potentialités ou leurs performances opérationnelles et ce en lien avec les autres départements de l’ONERA.
Enfin elle dispose d’un Bureau d’Etude spécialisé dans la Conception Assistée par Ordinateur au service de l’ensemble du département.
COmmande, Vérification Numérique, Implantation (COVNI)
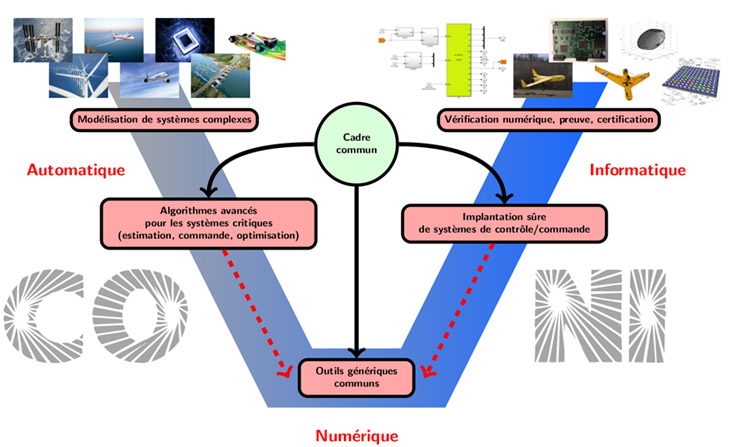
Les activités de recherche de l’unité COVNI (COmmande, Vérification Numérique, Implantation) conduisent au développement d’outils et de méthodes pour :
- la construction de modèles dynamiques simplifiés afin de faciliter leur simulation, leur analyse ou la synthèse de loi contrôle,
- la modélisation / expérimentations et enrichissement de modèles par assimilation de données pour des plateformes d’exécution embarquées en vue de leur certification en particulier pour l’implantation de fonctions basées IA.
- la modélisation de réseaux de communications embarqués (type AFDX, TSN, ...) afin de déterminer des configurations optimales et de répondre aux exigences de certification (correction et borne temporelle pire-cas).
Cette unité de recherche rassemble des informaticiens et des automaticiens qui cherchent à répondre, dans leur discipline propre et à leur intersection, aux problématiques liées à la complexité croissante et au besoin de certification des systèmes critiques étudiés.
Conception de Systèmes Aérospatiaux Multi-domaines (CSAM)
L’unité CSAM (Conception de Systèmes Aérospatiaux Multi-domaines) conduit des travaux sur la conception et l’évaluation de performances de nouveaux concepts de véhicules aérospatiaux en prenant en compte au mieux leurs aspects multidisciplinaires.
De ce fait, CSAM axe ses recherches sur le développement de méthodes et d’outils innovants pour la conception, afin d’enrichir et d’adapter ses processus basés sur l’optimisation multidisciplinaire. Ces études méthodologiques lui permettent de répondre aux travaux d’expertise qui lui sont confiés sur la définition et l’évaluation de systèmes futurs et pour des applications duales (systèmes de combat aérien, aérostats, High Altitude Pseudo Satellites (HAPS) et satellites).
Ce positionnement à la fois multidisciplinaire et multi-domaines, exploitant toute la plage d’altitude de l’aéronautique et du spatial, la conduit naturellement à mener des projets en collaboration avec les autres unités du DTIS, notamment au sein de la thématique Conception et Optimisation des Systèmes. Elle travaille en lien étroit avec tous les départements de l’ONERA afin de s’appuyer sur leurs expertises métiers respectives.
Exigences Décision Optimisation (EDO)
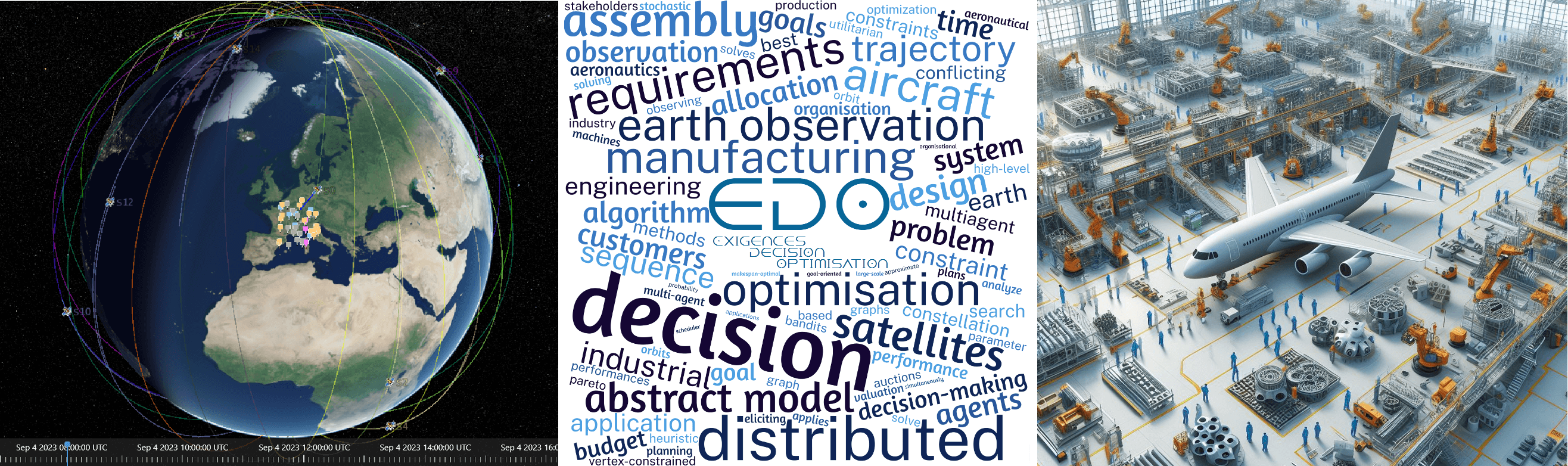
L'équipe Exigences Décision Optimisation (EDO) mène des travaux allant de la résolution de problèmes d'optimisation complexes à la modélisation et l'aide à la décision dans les contextes aéronautique et spatial. Par exemple, EDO développe des techniques d'ordonnancement de tâches d'observation dans les constellations de satellites ou pour la conception préliminaire de lignes d'assemblage. Une partie importante des activités reposent sur des compétences spécifiques en Recherche Opérationnelle (RO) et en Intelligence Artificielle (IA), comme la planification sous incertitudes et les systèmes multi-agents, et aborde des questions fondamentales dans le domaine de l'apprentissage par renforcement. L’unité applique également diverses méthodes d'optimisation à la planification et aux trajectoires du trafic aérien pour améliorer sa sécurité et son impact environnemental. Par ailleurs, l'unité intervient sur des problématiques de certification aéronautique et d'embarquabilité de l'IA. L'unité s'intéresse aussi à la modélisation conceptuelle et ingénierie des exigences dans le cadre de la conception et la fabrication aéronautique.
Ingénierie Cognitive et Neurosciences appliquées (ICNA)
L'ingénierie cognitive est un domaine mêlant les sciences cognitives et les sciences de l'ingénieur autour des problèmes relatifs aux interactions homme/systèmes dans des finalités qui vont de la compréhension de systèmes complexes à leur pilotage et leur coordination dans un objectif général qui est souvent d'améliorer la performance des systèmes associant humains et machines.
L’unité ICNA (Ingénierie Cognitive et Neurosciences appliquées) mène des activités d’ingénierie cognitive pour le développement de nouveaux concepts d'Interaction Homme/Système (IHS), dans le but de gérer des systèmes ou des opérations complexes (nombre de variables important et interdépendantes, processus dynamiques et fortement couplés, intégration de l'homme dans la boucle de pilotage ou de décision, etc.). Celles-ci s'appuient sur un environnement particulièrement riche en matière de traitement de l'information notamment pour la reconnaissance et l'analyse d'activités humaines, de commande de systèmes pour gérer les interactions dynamiques homme/système, ainsi que de simulation interactive (moyen LABSIM).
Identification, Dynamique du vol et COmmande (IDCO)
Le domaine d'activité de l'unité IDCO (Identification, Dynamique du vol et COmmande) est centré autour du développement de méthodes et d'outils innovants pour la conception des systèmes de commande répondant à des objectifs ambitieux de performance et de fiabilité tout en respectant des contraintes de certification.
Les développements actuels visent à répondre aux besoins des futurs programmes de véhicules aérospatiaux, au travers de collaborations entretenues de longue date avec de nombreux partenaires industriels et agences. Les compétences des membres de l'unité couvrent l'ensemble des disciplines de l'automatique utiles à ces activités : la modélisation pour la commande et l'identification, l'identification de systèmes dynamiques, l'estimation d'état et de paramètres, la synthèse (commande robuste, adaptative et non-linéaire), l'analyse et la validation de lois de commande, le diagnostic et la reconfiguration pour la sûreté du vol.
L'unité dispose également de compétences pluridisciplinaires et notamment d'une solide connaissance de la dynamique du vol régulièrement mises à contribution pour l'expertise des qualités de vol et des systèmes de commande de vol dans les projets de nouveaux concepts d'aéronefs.
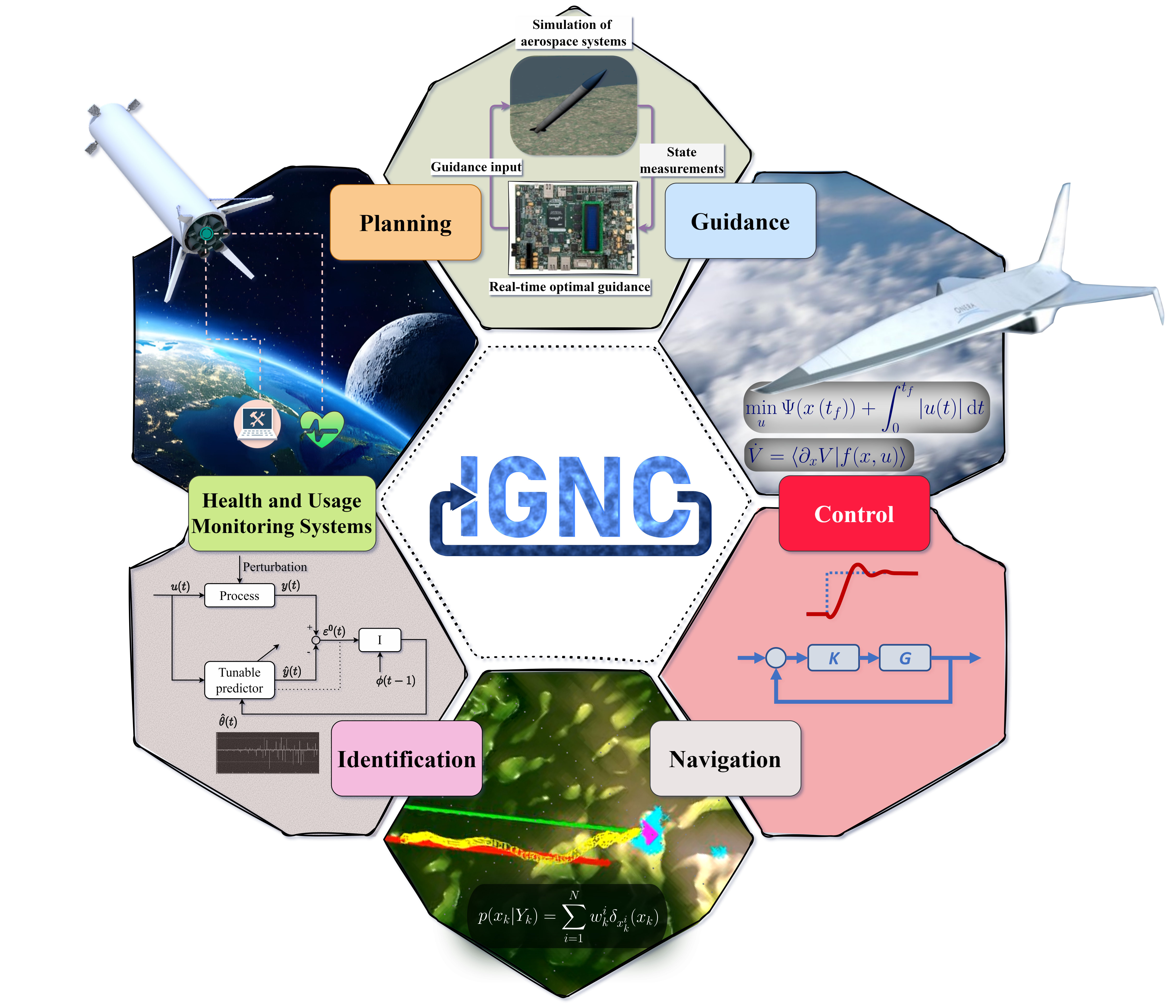
Identification, Guidage, Navigation, Contrôle (IGNC)
L’unité IGNC (Identification, Guidage, Navigation, Contrôle) élabore, développe et évalue des méthodes innovantes pour la chaine de Navigation-Guidage-Pilotage (NGP) des systèmes aérospatiaux.
Les compétences scientifiques de l’unité incluent la modélisation des systèmes, l’identification des paramètres de modèle, la planification de trajectoire, la commande (guidage, pilotage) et l’estimation (navigation, diagnostic, pronostic). Pour évaluer les performances des méthodes en conditions opérationnelles, l’unité spécifie, implémente et intègre ses solutions dans des simulations fines développées en collaborations avec d’autres unités. L’unité IGNC accède également à des moyens expérimentaux (capteurs inertiels, robots, calculateurs GPU et FPGA) pour valider certains concepts de la chaine NGP.
Les applications considérées visent à répondre aux enjeux actuels du domaine aérospatial, elles comprennent les systèmes de défense (missiles), les systèmes spatiaux (lanceurs réutilisables) et la robotique aérienne (systèmes multi-agents).
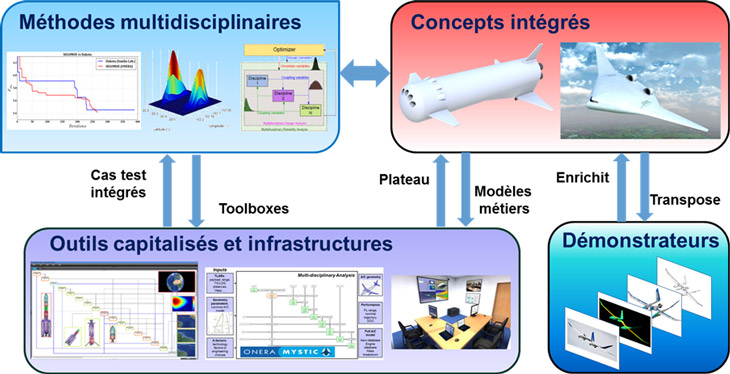
Méthodes Multidisciplinaires, Concepts Intégrés (M2CI)
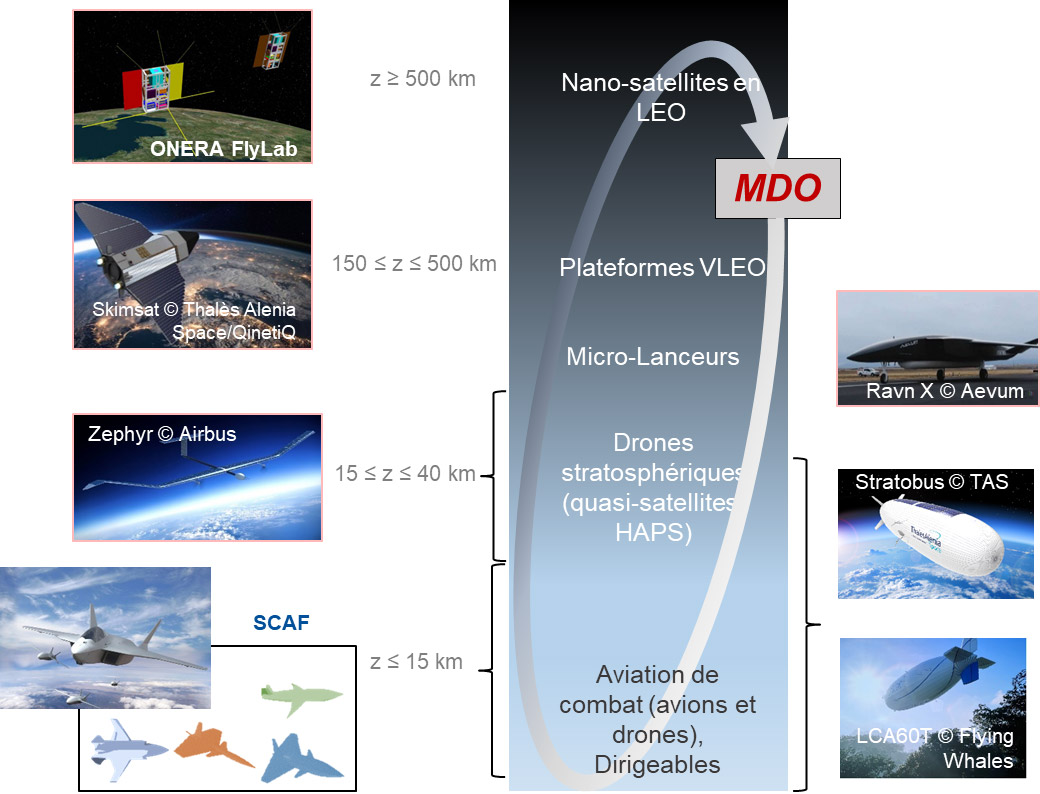
L’unité M2CI (Méthodes Multidisciplinaires, Concepts Intégrés) met à profit la dualité applications-méthodes dans le domaine de la conception de véhicules aérospatiaux pour, d’une part, développer des méthodes inspirées des besoins applicatifs et validées sur des cas représentatifs de ces derniers, et d’autre part proposer et évaluer des concepts intégrés innovants d’aéronefs ou de lanceurs dont la définition est améliorée par l’utilisation de méthodes de conception adaptées.
Les méthodes développées (algorithmes d’optimisation, formulations MDO, modèles de substitution, gestion des incertitudes) visent à augmenter le nombre de disciplines prises en compte, améliorer l’exploration multi-fidélité de l’espace de conception et quantifier les incertitudes dans un cadre multidisciplinaire. Du point de vue applicatif, il s’agit de porter des idées de concepts innovants (par exemple aéronefs à propulsion hybride, lanceurs réutilisables ailés) depuis l’exploration initiale jusqu’à l’expertise au profit des industriels du secteur, en passant par des approches collaboratives au niveau national ou européen.
Enfin, l’équipe promeut d’une part la capitalisation des modèles et méthodes sous forme de briques intégrées à un environnement de conception partagé à l’ONERA, et d’autre part la validation de certains concepts ou technologies par la spécification et la mise en œuvre de démonstrateurs. Elle cherche à développer des coopérations nationales ou internationales avec d’autres laboratoires ou centres de recherche sur le volet méthodologique, ainsi qu’une approche partenariale avec l’industrie pour le développement des concepts innovants. Elle travaille naturellement avec les autres unités du DTIS sur la thématique Conception et Optimisation, et avec les départements métiers de l’ONERA pour la multidisciplinarité.
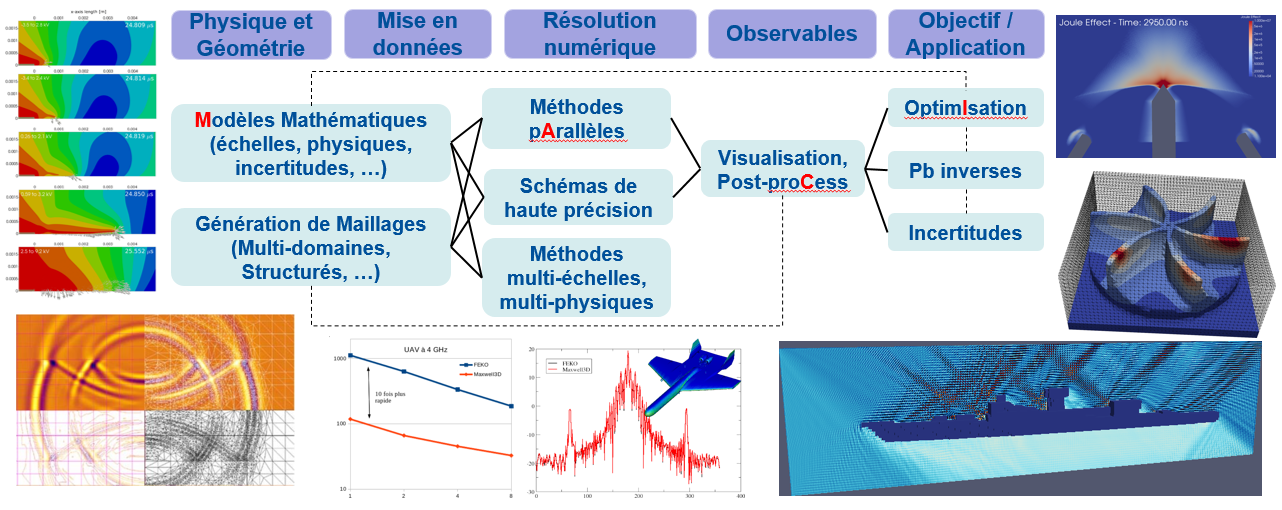
Mathématiques Appliquées et Calcul Intensif (MACI)
L'unité MACI (Mathématiques Appliquées et Calcul Intensif) intervient en support des activités de développement des modèles numériques à l'Office. Les travaux qui sont menés visent principalement le développement des grands codes de calcul de l'Office. Ils sont réalisés conjointement avec les équipes numériques des autres départements.
Les compétences de l'équipe couvrent un large domaine des mathématiques appliquées. Plus spécifiquement, elles portent sur les schémas d'ordre élevé, la modélisation multi-échelle, les formulations intégrales, les méthodes de décomposition de domaines et les algorithmes d'optimisation. La résolution des systèmes linéaires et leur implémentation sur des architectures parallèles et multi-cœurs est aussi un domaine de compétence de l'unité.
Ces travaux conduisent à des développements de modules intégrés dans les codes de l'Office ou dans des composants logiciels externes. L’unité dispose d’accès aux clusters de développement de l’ONERA afin de pouvoir réaliser des tests de performance sur différents types d’architectures de calculateurs.
Modélisation, Analyse et Restitution des Systèmes de défense (MARS)
L’unité MARS (Modélisation, Analyse, et Restitution des Systèmes de défense et de rentrée) mène des études portant sur la conception, la rétro-ingénierie, la modélisation, et l’évaluation des performances de systèmes de défense et de rentrée atmosphérique. Elle est notamment en charge de travaux de définition et de caractérisation de la menace pour appuyer la conception de futurs systèmes de défense.
MARS dispose pour cela d’outils d’aide à la conception, de simulation de trajectoires et de confrontation attaque – défense, qu’elle développe ou contribue à développer. Elle ambitionne également de mettre en œuvre une démarche expérimentale de démonstrations technologiques. L’expertise de l’unité MARS réside dans la maîtrise du dimensionnement des systèmes aérospatiaux, et dans la capacité de développement et d’intégration de différents modèles métier (guidage-pilotage, aérothermodynamique, propulsion, mécanique du vol, capteurs, …) dans les outils de simulation.
Pour appuyer son expertise, l’unité conduit des développements méthodologiques et des travaux de recherche dans les domaines de l’optimisation de conception multidisciplinaire et de l’analyse de systèmes de systèmes (analyse fonctionnelle, métriques de performances, architectures de systèmes de défense).
Mesure Image Co-Conception (MIC)
L'unité MIC (Mesure Image Co-Conception) de l'ONERA élabore des traitements pour révéler des grandeurs physiques enfouies dans les observations image. Son expertise s'étend de la microscopie à l'observation spatiale. La maîtrise des modèles de formation du signal, du phénomène physique jusqu’à la donnée numérisée lui permet de proposer des approches transverses de co-conception visant à optimiser conjointement capteurs et traitements.
Ces traitements concernent la métrologie optique pour la mesure d'écoulement en soufflerie (PIV, BOS, TDLAT), la mesure de déformation de matériaux ou de tissus biologiques (speckle dynamique), le contrôle non destructif, l’observation de la terre (SAR, hyperspectral, infra rouge) et de l’espace (détection et caractérisation de satellites ou d’exoplanètes).
En interaction avec les départements de l'ONERA, MIC joue un rôle crucial pour la valorisation des grandes campagnes d’essais et la conception de nouveaux moyens de mesure, renforçant ainsi l’impact de l’Office dans les secteurs civils et militaires.
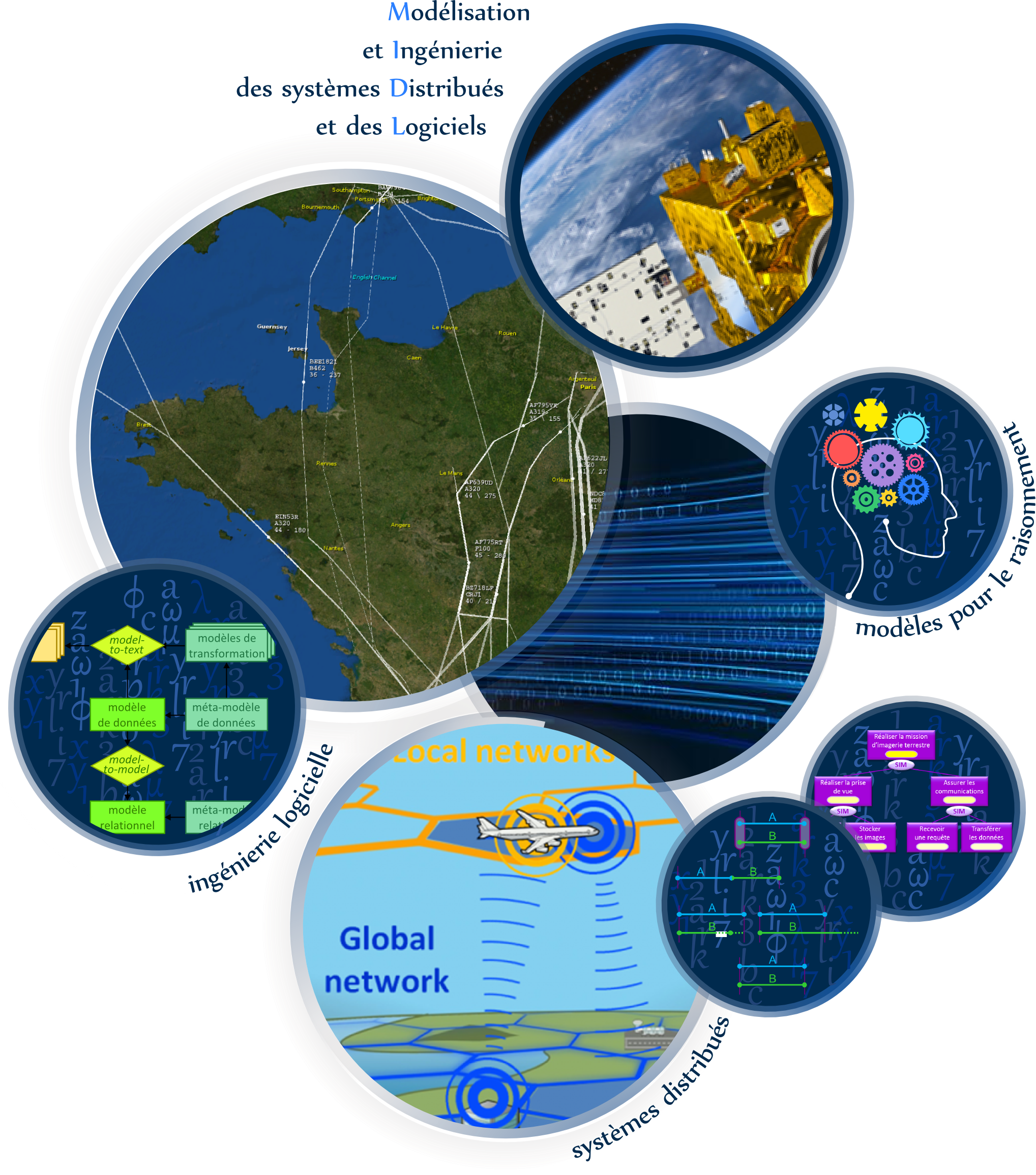
Modélisation et Ingénierie des systèmes Distribués et Logiciels (MIDL)
L’unité MIDL (Modélisation et Ingénierie des systèmes Distribués et Logiciels) se positionne sur les applications de l’informatique au sens large, et vise à promouvoir et réaliser la mise en œuvre de méthodes informatiques dans des cadres applicatifs réels. D’une part, l’unité développe dans le cadre de ses activités de recherche des méthodes informatiques, dans une démarche allant de l’analyse de besoins jusqu’à la réalisation de cadres d’intégration, au travers de trois axes scientifiques : ingénierie logicielle, systèmes distribués, et modèles pour le raisonnement. D’autre part, ses membres dans leur ensemble ont de bonnes connaissances de différents domaines applicatifs et sont ouverts sur des applications nouvelles. L’unité est bi-site, chaque composante de l’unité pouvant servir de relais local aux membres de l’autre, ce qui participe à l’animation transverse du département et permet le décloisonnement des méthodes à travers les divers domaines applicatifs liés aux écosystèmes locaux.
RotorcraFts, Dynamique du vol et Systèmes (RFDS)
L’unité RFDS (RotorcraFts, Dynamique du vol et Systèmes) réalise des travaux de modélisation et simulation de la dynamique du vol des appareils à voilures tournantes (hélicoptères, convertibles, combinés, tandem, coaxiaux ou architectures innovantes Propulsion Distribuée, hybrides, électriques) pour l’aide à la conception et l’évaluation (performances, qualités de vol et impacts environnementaux) des appareils futurs– pilotés, OPV ou UAV. Au-delà de ces compétences, l’unité dispose d’une large connaissance des contextes opérationnels et réglementaires qu’elle met au profit du développement de systèmes d’aide aux équipages pour les avioniques nouvelles (lois de pilotage évoluées, aide à la gestion de mission, aide à la protection du domaine de vol, etc.). Ainsi l’ensemble de ses travaux participent à l’effort d’amélioration de la sécurité des vols en synergie de celle des performances en opération. L’unité dispose également d’un banc de prototypage système (Simulateur PycsHel), intégré au laboratoire de simulation LABSIM, lui permettant d’évaluer les appareils et systèmes qu’elle développe, allant jusqu’à la simulation pilotée et aux expérimentations en vol pour lesquelles elle s’appuie sur ses partenaires opérationnels (DGA-EV, CEPA, ...).

Risque – Identification, Modélisation et Evaluation (RIME)
L’unité RIME (Risques – Identification, Modélisation, Évaluation) fédère des activités qui portent sur le développement et la mise en œuvre de méthodes et d’outils destinés à identifier les règlements et exigences applicables aux systèmes, modéliser les architectures et concepts d'emploi de ces systèmes, évaluer les risques induits au plus tôt, et analyser les données collectées tout au long de leur cycle de vie. Ces activités s'intéressent à la définition d'un système d'un point de vue technique, mais aussi humain et organisationnel. Les risques considérés sont liés à la sécurité des biens, des personnes et des informations, ainsi que d'autres aspects comme le respect des contraintes environnementales, les considérations éthiques, et la satisfaction des indicateurs de performance. Les méthodes et outils développés par l’unité se fondent sur des approches provenant de plusieurs thématiques scientifiques (intelligence artificielle et décision, ingénierie des systèmes et des logiciels, mathématiques appliquées, calcul scientifique). En collaboration étroite avec les autres unités du DTIS, ces techniques sont appliquées aux systèmes de drones, aux nouveaux concepts d’aéronefs, aux systèmes de transport aérien futur et à de nombreux autres systèmes cyber-physiques.
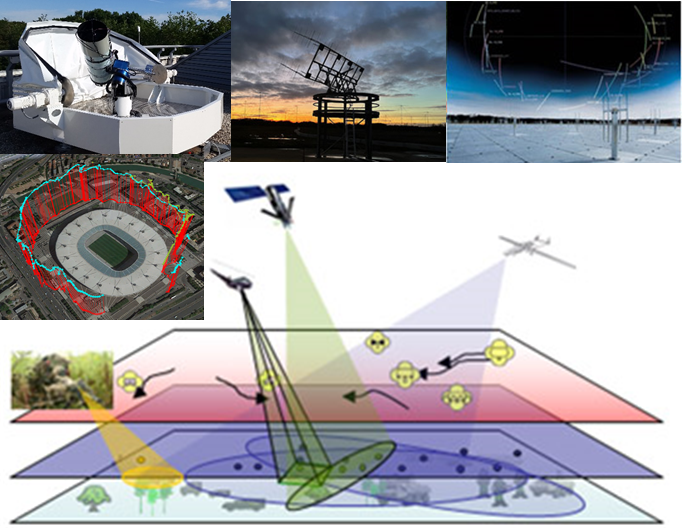
Systèmes de Surveillance Aérospatiaux et de Défense (S2AD)
L’unité S2AD (Systèmes de Surveillance Aérospatiaux et de Défense) a une orientation applicative et système autour des grands domaines que sont la surveillance de l’espace et toutes les missions qui s’y rapportent avec des activités couvrant aussi bien le côté technico-opérationnel que les études amont, la surveillance de l’espace aérien dans le cadre de la lutte anti-drones, la surveillance des systèmes spatiaux, notamment pour ce qui est de l’évaluation de leurs vulnérabilités aux menaces qu’elles soient ou non intentionnelles, l’alerte avancée, notamment via l’évaluation d’architecture ou le développement de concepts innovants de surveillance de la prolifération, et les systèmes d'inspection en orbite, en lien avec les aspects guidages, coopératif ou non, fusion multi-capteurs et optimisation de réseaux dynamique de capteurs. L’unité étudie, adapte ou développe des méthodologies propres dans tous les champs scientifiques, avec un focus sur l’estimation, la commande, le traitement de l’information, la modélisation et l’évaluation de performances.
Systèmes Autonomes Perceptifs, Interprétation et Apprentissage (SAPIA)
L’unité SAPIA (Systèmes Autonomes Perceptifs, Interprétation et Apprentissage) développe des méthodologies innovantes dans les domaines de la vision par ordinateur, du contrôle et de l’intelligence artificielle qui trouvent leurs finalités en navigation autonome de systèmes robotiques ou aérospatiaux, dans les fonctions de Détection-Reconnaissance-Identification-Localisation et en observation de la Terre.
Ses axes de recherche concernent l'étude des techniques d’apprentissage machine appliquées à la perception et à interprétation de données multimédia - conception, robustesse et explicabilité -, la modélisation géométrique et sémantique de l’environnement, l’estimation d’état multi-capteurs, le guidage et l’estimation de trajectoire ainsi que la perception et le contrôle distribués pour les systèmes multi-véhicules.
Le développement et la démonstration de ses travaux s’appuient sur deux installations expérimentales : le Deeplab, un cluster dédié aux calculs GPUs, et l’Atelier d’Expérimentation en Perception Autonome (ATEXPA), qui rassemble des moyens d’acquisition de données, des plateformes mobiles pilotables (drones, robots roulants, hexapodes) et des moyens de prototypage rapide nécessaires à la personnalisation et la fabrication de plateformes robotiques.
Systèmes Embarqués, Autonomes et Sûrs (SEAS)
L'unité SEAS (Systèmes Embarqués Autonomes Sûrs) a pour objet le développement et le fonctionnement sûr des systèmes embarqués et des systèmes autonomes. Dans cette optique, elle s'intéresse en particulier aux problématiques de la spécification, la conception et l'analyse, en mettant l'accent sur leurs aspects formels.
Les axes de recherche mis en œuvre pour répondre à ces différentes problématiques s'appuient sur : des langages de spécification formelle ; des langages de modélisation d'architectures de systèmes ou de leur comportement ; des techniques de vérification formelle ou d'analyse temps-réel ; des architectures et algorithmes de décision, de la planification de tâches à la gestion de leur exécution ; des architectures de décision et de gestion de mission multi-engins, réparties entre stations sols et systèmes embarqués ; et des outils et méthodes permettant l'implantation sur des plateformes physiques.
Les travaux de l'unité SEAS comportent également un volet expérimental avec une mise en œuvre sur différentes plateformes (drones, robotique, systèmes cyber-physiques, systèmes aéronautiques).
Simulation et Intégration de Modèles et Systèmes (SIMS)
L'unité SIMS (Simulation et Intégration de Modèles et Systèmes) est en charge de développer et maintenir les moyens de simulation permettant de traiter des études à caractère technico-opérationnel : études systèmes de systèmes, évaluation de performances de systèmes dans un environnement réaliste mais aussi analyse de concepts d'emploi, d'architectures et d'organisations.
A ce titre :
- SIMS développe le contenant : des outils dont principalement un framework de simulation multi-acteurs multi-domaines permettant de préparer des scénarios complexes sur fond de carte, de jouer des simulations suivant différents modes (distribué ou standalone, mono ou multi-run, visuel ou non) ;
- SIMS coopère avec les autres unités et départements pour développer le contenu : des modèles scientifiques pluridisciplinaires (systèmes, radar, optique, environnement, ...) ; cette coopération repose sur une politique de déploiement des outils et de soutien aux utilisateurs;
- SIMS réalise des études en mettant en œuvre des scénarios opérationnels au sein des outils jusqu'à leur exploitation, pouvant être réalisée conjointement avec les experts métier.
L'unité s'inscrit dans une démarche de génie logiciel aboutie reposant sur des développements rigoureux, une chaîne d'intégration continue complète et une amélioration continue des moyens informatiques mis en place visant, in fine, à améliorer la productivité ainsi que la qualité des études réalisées. Les membres de l'unité conduisent également une veille informatique et scientifique continue pour garder les outils développés au niveau des standards de l'industrie. Enfin, la volonté de capitalisation des modèles et données associées permet à l'unité SIMS d'être le garant de moyens de simulation pérennes.