
DTIS - Information Processing and Systems
- ONERA
- Scientific Departments
- DTIS - Information Processing and Systems
- Research units
DTIS - Research units
AEI | CASH | COVNI | CSAM | EDO | ICNA | IDCO | IGNC | M2CI | MACI | MARS | MIC | MIDL | RFDS | RIME | S2AD | SAPIA | SEAS | SIMS
Automation, Experimentation, Integration (AEI)
The AEI research unit (Control, Experimentation, Integration) is tasked with analyzing and reinforcing the links between control theory and integration, to facilitate the transfer of the upstream work conducted at ONERA to our partners.
Based on a wide range of skills covering the main disciplines of automatics (system modeling, estimation, data fusion, control design, signal processing), the unit conducts research and develops tools to meet the specifications of aerospace and robotics stakeholders. The AEI research scientists design or adapt techniques to take into account integration constraints inherent in any experimental activity.
In this context, AEI is characterized by a strong experimental activity, using the numerous UAV platforms of the ReSSAC laboratory. Embedded avionics are designed from hardware to software. The exploitation of the experimental results enables the theoretical results to be matched against the field realities, and provides valuable feedback that ONERA can use for improving its methods and tools. The end goal of this approach is to make the studied systems more efficient, more secure and more robust / hazard-resilient.
Advanced Design of Hypersonic Systems (CASH)

Advanced Design of Hypersonic Systems
The CASH unit (Conception Avancée de Systèmes Hypersoniques, french for Advanced Design of Hypersonic Systems) primarily focuses on defining and assessing the performance of new hypersonic air-breathing aerospace vehicle concepts for both military and civilian applications (missiles, military and civilian aircraft, reusable launchers, etc.). These activities span from preliminary design studies to ground or flight testing.
To achieve this, the unit relies on a systems engineering expertise and a multidisciplinary approach, enabling the design of vehicles with varied architectures and the evaluation of their potential or operational performance, in collaboration with other ONERA departments.
Finally, the unit includes a Design Office specialising in Computer-Aided Design, which supports the entire department.
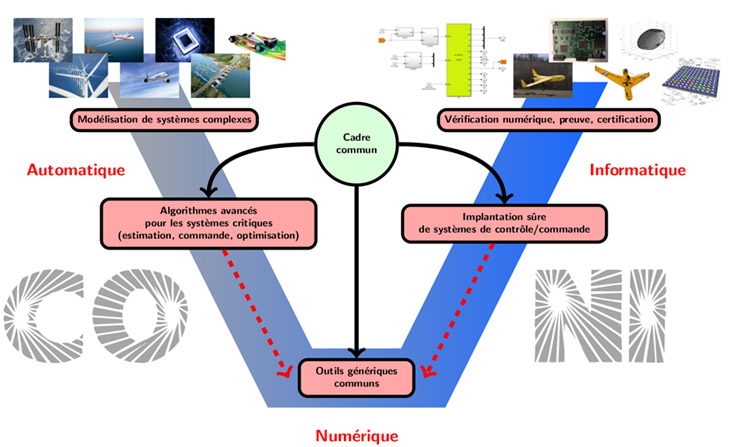
Control, verification and implementation (COVNI)
The research activities of the COVNI team (COmmande, Verification Numérique, Implantation) lead to the development of methods and numerical tools for:
- the construction of simplified dynamic models in order to facilitate their simulation, analysis or the synthesis of control laws,
- the modeling / experiments and enrichment of models by data assimilation for embedded execution platforms to move towards their certification, with a particular interest in the implementation of AI-based functions.
- the modeling of embedded communication networks (type AFDX, TSN, ...) aiming at determining optimal configurations and meet ingcertification requirements (correction and worst-case time delays).
This research unit brings together computer science and control design research engineers who seek to respond, in their own discipline and at their intersection, to the issues related to the increasing complexity and the need for certification of the critical systems studied.
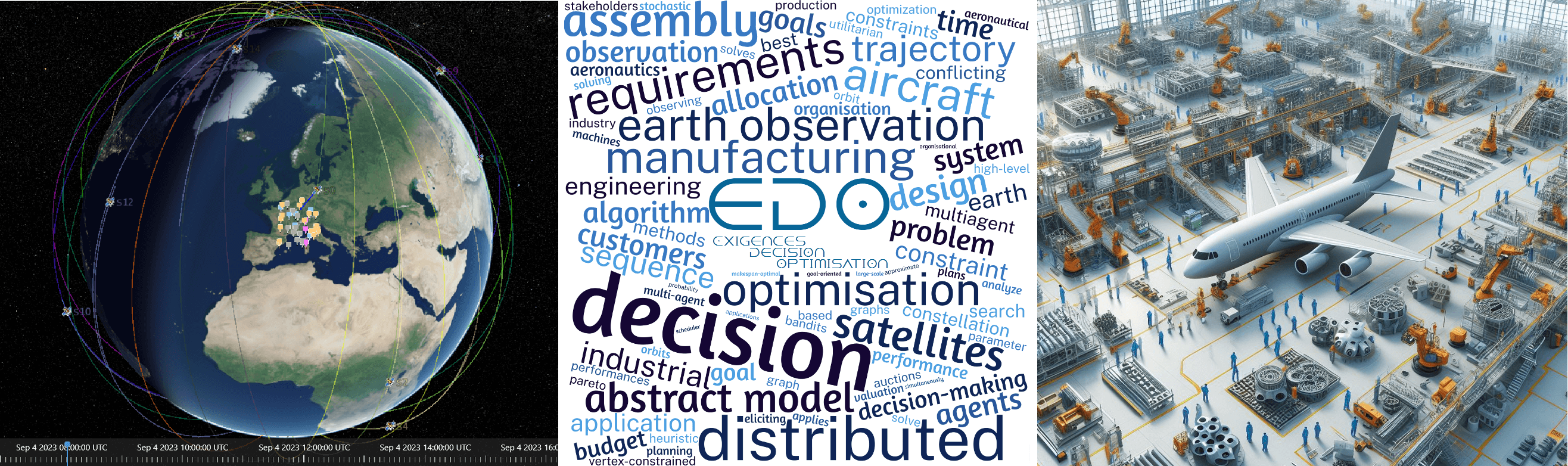
Requirements, Decision, Optimisation (EDO)
The Requirements, Decision, Optimisation (EDO) team conducts research ranging from solving complex optimisation problems to modelling and decision support in the aerospace domain. For example, EDO develops task scheduling techniques for satellite constellations or the preliminary design of assembly lines. Much of its work relies on specific expertise in Operations Research and Artificial Intelligence (AI), such as planning under uncertainty and multi-agent systems, while addressing fundamental issues in reinforcement learning. Our unit also applies various optimisation methods to air traffic planning and trajectory design to improve safety and reduce environmental impact.
Furthermore, we focus on conceptual modelling and requirements engineering in the context of aircraft design and manufacturing, and are involved in addressing issues related to aerospace certification and the usability of AI.
Cognitive engineering and applied neuroscience (ICNA)
 Cognitive engineering is a field combining cognitive science and engineering science around the problems relating to human/system interactions. Its goals range from the understanding of complex systems to their steering and coordination toward a general objective, which is often to improve the performance of systems composed of people and machines working in association.
Cognitive engineering is a field combining cognitive science and engineering science around the problems relating to human/system interactions. Its goals range from the understanding of complex systems to their steering and coordination toward a general objective, which is often to improve the performance of systems composed of people and machines working in association.
The ICNA (Cognitive engineering and applied neuroscience) unit conducts cognitive engineering activities for the development of new HSI (Human/System Interaction) concepts, with the goal of managing complex systems or operations e.g. many and interdependent variables, dynamic and strongly coupled processes, integration of humans in the steering or decision-making loop, etc.. These activities draw on an environment that is particularly rich in terms of information processing (in particular for the recognition and analysis of human activities), in terms of system control for managing dynamic human/system interactions, and in terms of interactive simulation (LABSIM resource).
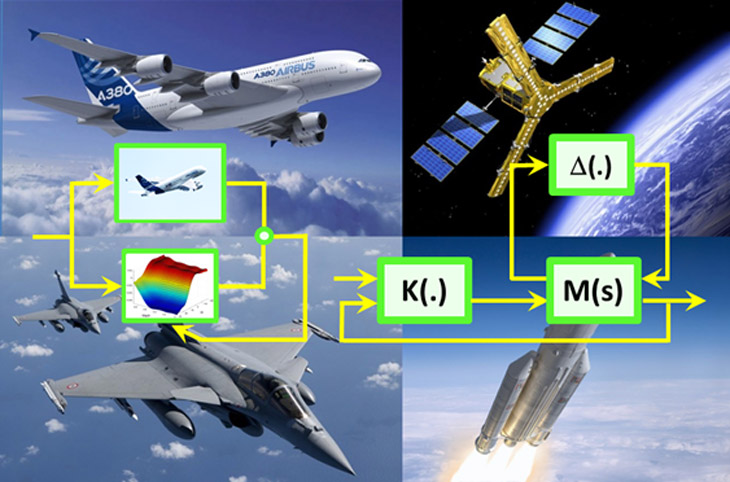
Identification, flight dynamics and control (IDCO)
The IDCO (Identification, flight Dynamics, and COntrol) unit specializes in developing innovative methods and tools for designing control systems that achieve ambitious performance and reliability objectives while complying with certification constraints. Ongoing developments aim to address the needs of future aerospace vehicle programs through long-term collaborations with various industrial partners and agencies.
The skills of the unit's members cover all disciplines of automatic control that are relevant to these activities: modeling for control and identification; identification of non-linear dynamic systems; state and parameters estimation; control design (robust, adaptive and non-linear control); analysis and validation of control laws; machine learning control; diagnostic and control allocation for flight safety.
The unit also has multidisciplinary skills in particular, a solid know-how of flight dynamics, which is regularly solicited for expert assessment of handling qualities and flight control systems in new aircraft concept projects.

Development of guidance-control laws of the EOLE demonstrator, validation on simulator and flight tests

Aeroelastic model identification for flutter flight tests
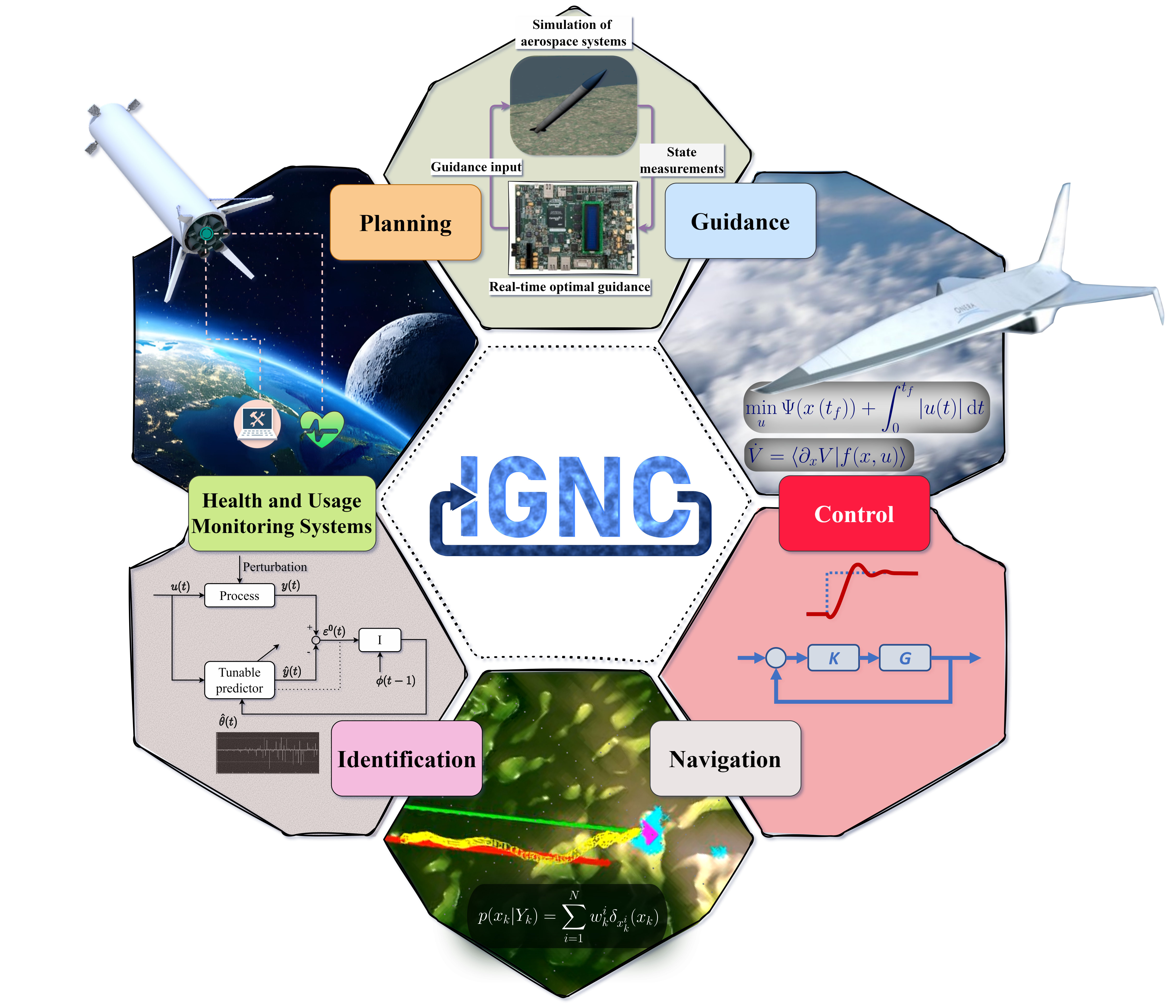
Identification, Guidance, Navigation, Control (IGNC)
The IGNC research unit (Identification, Guidance, Navigation, Control) develops, implements and evaluates innovative methods for the Guidance-Navigation-Control (GNC) loop of aerospace systems.
The scientific expertise of the unit includes system modeling, model parameter identification, trajectory planning, guidance, control and estimation (navigation, diagnosis, prognosis). To evaluate the performance of these methods under operational conditions, the unit specifies, implements and integrates its solutions into fine simulations developed in collaboration with other units. The IGNC unit also has access to experimental resources (inertial sensors, robots, GPU and FPGA computers).
The considered applications are aimed at meeting current challenges in the aerospace field, they include defense systems (missiles), space systems (reusable launchers) and aerial robotics (multi-agent systems).
Multidisciplinary methods, integrated concepts (M2CI)
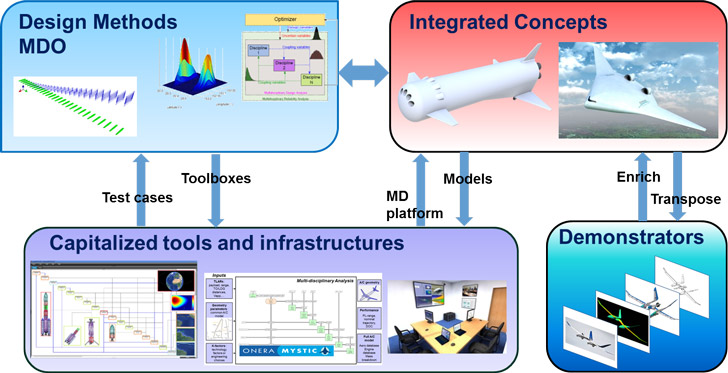
M2CI (Multidisciplinary methods, integrated concepts) takes advantage of the applications-methods duality in the field of aerospace vehicle design for:
- On the one hand, developing methods inspired by the needs of applications and validated on representative cases of these needs
- On the other hand, proposing and assessing innovative integrated concepts for aircraft or launch vehicles, the definition of which is improved by the use of appropriate design methods
The developed methods (optimization algorithms, MDO formulations, surrogate models, uncertainties management) aim at increasing the number of disciplines covered, improving multi-fidelity exploration of the design space, and quantifying uncertainties in a multidisciplinary framework. From the application viewpoint, the goal is to promote innovative concept ideas (e.g., hybrid-electric aircraft, reusable winged launch vehicles), from initial exploration to expert assessment for the benefit of the sector's manufacturers, including collaborative approaches at national or European level.
Lastly, the team promotes:
(i) capitalization of the models and methods in the form of building blocks integrated within a shared design environment at ONERA
(ii) validation of certain concepts or technologies through the specification and deployment of demonstrators.
It seeks to develop national or international cooperation with other laboratories or research centers on the methodological aspects, and a partnership approach with industry for the development of innovative concepts. It works in natural synergy with the other units of the DTIS (Information processing and systems) on the Design and Optimization topic, and with the ONERA specialized departments for disciplinary issues.
Applied mathematics and scientific calculation (MACI)
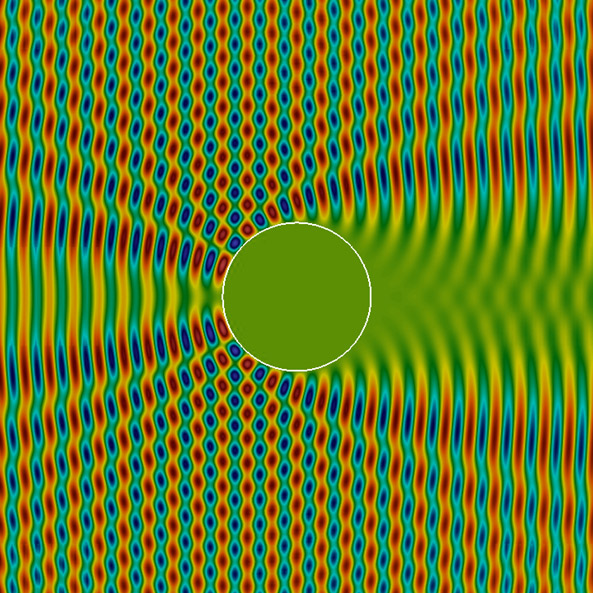
Visualization using the Previsio software
of a compressed and precise representation
of acoustic radiation by a diffracting
sound-soft object
The Applied Mathematics and Intensive Computations (MACI) Research Unit provides a methodological support for all numerical models and simulations developed at ONERA. The Mathematical activities performed within the unit are led conjointly with the numerical experts from the other departments at ONERA and aim at enhancing the performances of all key numerical solvers of the Office.
The area of expertise of the team members covers a wide panel of Applied Mathematics topics and includes in particular high order numerical schemes, multi-scale modelling, Integral Equations, Domain Decomposition Methods, Uncertainties and Optimisation algorithms. Solving big linear systems on massively parallel and multi-core architectures is also a topic of interest.
All these developments lead to specific numerical modules either directly included in the solvers or available as external software components. In order to run performance tests on different types of computer architectures, the Unit does take advantage of the development clusters available at ONERA.
Modelling, Analysis, and Design of Defence and Re-entry Systems (MARS)
The MARS unit (Modelling, Analysis, and Design of Defence and Re-entry Systems) conducts studies and research activities focused on the design, reverse engineering, modelling, and performance assessment of defence systems and re-entry vehicles. It is especially in charge of defining and characterizing threats to support the design of future defence systems.
To achieve this, MARS uses design support tools, trajectory simulation, and attack-defence confrontation simulations, which it develops or contributes to developing. The unit also aims to implement an experimental approach for technological demonstrations. MARS’ expertise lies in overall sizing of aerospace systems and in the ability to develop and integrate various engineering models (guidance-control, aerothermodynamics, propulsion, flight mechanics, sensors, etc.) within simulation tools.
To support its expertise, the unit carries out methodological developments and research work in the fields of multidisciplinary design optimisation and system-of-systems analysis (functional analysis, key performance indicators, and defence system architectures).
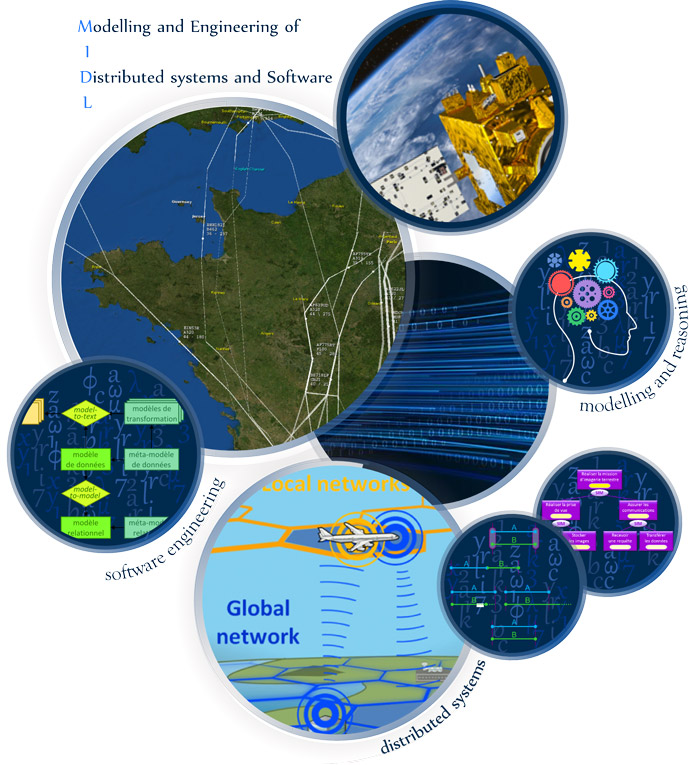
Modeling and engineering of distributed systems and software (MIDL)
The MIDL (Modeling and engineering of distributed systems and software) unit deals with IT applications in the broad sense, and aims at promoting and facilitating the implementation of IT methods in actual application frameworks. Firstly, as part of its research activities, the unit develops IT methods in a process ranging from the analysis of needs up to the implementation of integration frameworks by way of three scientific approaches: software engineering, distributed systems, and reasoning models. Secondly, its members as a whole are highly knowledgeable in different application domains and are open to new applications. The unit is twin-site, with each component of the unit able to serve as a local relay for those on the other site, thereby supporting the cross-functional momentum of the department and breaking down silos between methods by way of the various application domains linked to the local ecosystems.
Rotorcraft, Flight Dynamics and Systems (RFDS)
The RFDS (RotorcraFt, Flight Dynamics and Systems) research unit carries out modelling and simulation activities on the flight dynamics of rotary-wing aircraft (helicopter, tilt-rotor, compound, tandem, coaxial or innovative Distributed Propulsion, hybrid and electric architectures) to assist in the design and evaluation (performance, handling qualities and environmental impact) of future manned aircraft, OPVs or UAVs.
Beyond these skills, the unit has extensive knowledge of operational and regulatory contexts, which it applies to the development of crew assistance systems for new avionics (advanced flight control laws, mission management assistance, flight envelope protection assistance, etc.), contributing to the effort of improving flight safety in synergy with operational performance.
The unit has also developed and operates a system prototyping bench (PycsHel simulator), integrated into the LABSIM simulation laboratory, enabling the evaluation of the aircraft and systems it develops, through piloted simulation and flight experiments, for which it relies on its operational partners (DGA-EV, CEPA, etc.).

Risk – Identification, modeling and assessment (RIME)
The RIME unit (Risks – Identification, Modelling, Evaluation) brings together activities focused on the development and implementation of methods and tools aimed at identifying the regulations and requirements applicable to systems, modelling the architectures and operational concepts of these systems, assessing induced risks as early as possible, and analysing data collected throughout their lifecycle. These activities address the definition of a system from technical, human, and organisational perspectives.
The risks considered include the safety and security of assets, people, and information, as well as other aspects such as compliance with environmental constraints, ethical considerations, and the achievement of performance indicators. The methods and tools developed by the unit are based on methodologies originating from multiple scientific fields, including artificial intelligence and decision-making, systems and software engineering, applied mathematics, or scientific computing.
In close collaboration with other DTIS units, these techniques are applied to drone systems, new aircraft concepts, future air transport systems, and many other cyber-physical systems.
Surveillance Systems for Aerospace and Defense (S2AD)
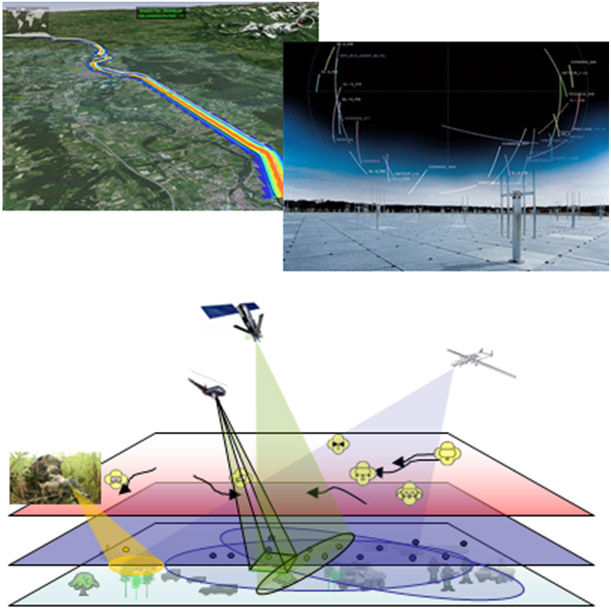
S2AD (Surveillance Systems for Aerospace and Defense) is application and system oriented towards the following domains:
- space surveillance and all associated missions, with activities covering the technical-operational side and upstream studies
- airspace surveillance and, in particular, expertise developed around the Air Command and Control System and C2's in general
- surveillance and space systems, especially related to the assessment of their vulnerabilities to threats either intentional or not
- early warning, in particular via the architecture assessment or the development of innovative proliferation surveillance concepts
- airborne surveillance systems, including in particular drones for surveillance or inspection missions, associated with the multi-vehicle GNC aspects, multi-sensor merging and optimization of dynamic sensor networks
The unit studies, adapts or develops dedicated methodologies in all the scientific fields, with a focus on estimation, control, information processing, modeling, and performance assessment.
Safe Embedded and Autonomous Systems (SEAS)
The mission of SEAS (Autonomous and secure onboard systems) involves the development and secure operation of onboard systems and autonomous systems. To this end, it particularly focuses on issues of specification, design and analysis, dealing with their formal aspects.
To address these various issues researches are based on:
- formal specification languages
- languages for modeling system architectures or their behavior
- formal verification or real-time analysis techniques
- architectures and algorithms for decision-making, from task planning to execution management
- decision-making and multi-machine mission management architectures, distributed between ground stations and onboard systems
- tools and methods for installation on physical platforms
The work of the SEAS unit also includes an experimental component, with implementation on various platforms (drones, robotics, cyber-physical systems, aeronautical systems).
Simulation, Infrastructure and Integration of Models and Systems (SIMS)
The research unit called SIMS (Simulation, Infrastructure and Integration of Models and Systems) is responsible for developing and maintaining simulation software to process technical-operational studies. In this context:
- SIMS develops the software: mainly a multi-actor multi-domain simulation framework which aims to create and run complex scenarios, to play simulations in different modes (distributed or standalone, single or multi-run, with visualization or not);
- SIMS cooperates with other units and departments to develop the content: multidisciplinary scientific models (systems, radar, optics, environment, etc.); this cooperation is based on a policy of deploying tools and supporting users;
- SIMS carries out studies by implementing operational scenarios within the simulation framework until their exploitation, which can be carried out jointly with experts.
The team implements a software engineering approach for all these developments and adopts a DevOps approach to control, validate and deploy these simulation softwares. The unit's members also carry out continuous IT and scientific monitoring to keep the tools developed up to industry standards. Finally, the objective pursued is to capitalize on all the models and tools developed.